Field Problems
This topic deals with the use of the finite element method to solve the steady state heat transfer problem. Such a problem can be termed generally as one of the many field problems. Other field problems include torsional deformation of bars, irrotational flow and acoustic problems. This topic makes use of the heat transfer problem to introduce concepts behind the solving of field problems using the FEM. Emphasis will be placed on one- and twodimensional heat transfer problems. Three-dimensional problems can be solved in similar ways, except for the increase in DOFs due to the dependency of field variables on the third dimension.The approach used to derive FE equations in heat transfer problems is a general approach to solve partial differential equations using the FEM. Therefore, the FE equations developed for heat transfer problems are directly applicable to all other types of field problems that are governed by a similar type of partial differential equation.
The general form of system equations of 2D linear steady state field problems can be given by the following general form of the Helmholtz equation:

where φ is the field variable, and Dx,Dy,g and Q are given constants whose physical meaning is different for different problems. For one-dimensional field problems, the general form of system equations can be written as

The following outlines different physical problems governed by Eqs. (12.1) or (12.2).
Heat Transfer in a Two-Dimensional Fin
Here we consider a problem of heat transfer in a two-dimensional fin, as shown in Figure 12.1. A 2D fin is mounted on a pipe. Heat conduction occurs in the x-y plane,and heat convection occurs on the two surfaces and edges.

Figure 12.1. A 2D fin mounted on a pipe. Heat conduction occurs in the x-y plane, and heat convection occurs on the two surfaces and edges.
Assume the fin is very thin, so that temperature does not vary significantly in the thickness (z) direction, therefore the temperature field is only a function of x and y. The governing equation for the temperature field in the fin, denoted by function φ (x, y), can be given by

where kx, ky are, respectively, the thermal conductivity coefficients in the x and y directions, h is the convection coefficient, t is the thickness of the fin, and φβ is the ambient temperature of the surrounding fluid. The heat supply is denoted by q, which can be a function of x and y. The governing equation (12.3) can be derived simply using Fourier’s laws of heat conduction and convection, as well as the conservation law of energy (heat). Equation (12.3) simply states that the heat loss due to heat conduction and heat convection should equal the heat supply at any point in the fin.
It can be seen that Eq. (12.3) takes on the general form of a field problem as in Eq. (12.1), with the substitution of

Heat Transfer in a Long Two-Dimensional Body
If the domain is elongated in the z direction, and the geometry and temperature do not vary in the z direction, as illustrated in Figure 12.2, then a representative 2D ‘slice’ can be used for modelling the problem.

Figure 12.2. Heat transfer in a long body.

Figure 12.3. Heat conduction along a thin one-dimensional fin.
In this case, there is no heat convection on the two surfaces of the 2D slice, and the governing equation becomes

which relates to the general form of the field equation with the following substitutions:
![]()
Heat Transfer in a One-Dimensional Fin
Consider a one-dimensional fin, shown in Figure 12.3. Assume that the fin is very thin, and the dimensions of the cross-section of the fin are much smaller than the length of the fin, so temperature does not vary in the cross-section, and hence is only a function of x. Heat conduction occurs in the x direction, and heat convection occurs on the circumferential surface of the fin. The temperature field in the fin, denoted by function φ(χ), is governed by the equation

where k is the thermal conductivity, h is the convection coefficient, A is the cross-sectional area of the fin, and P is the perimeter of the fin, as shown in Figure 12.3. Equation (12.7) is created in the same way as its 2D counterpart of Eq. (12.3). Equation (12.7) can be written in the general form of Eq. (12.2), with the substitutions of

Heat Transfer Across a Composite Wall
Many walls of industrial structures, or even simple appliances like a thermal flask, are composite in nature, i.e. they consist of more than one material. By utilizing the thermal conductivity properties of the material chosen, either thermal insulation or effective thermal heat transfer through the walls can be achieved.
Consider the heat transfer across a composite wall, as shown in Figure 12.4. The wall is assumed to be infinitely long in the y direction, and hence the heat source and any heat exchanges are also independent of y. In this case, the problem is one-dimensional. Since the wall is infinitely long, it is also not possible to have heat convection along the x-axis.
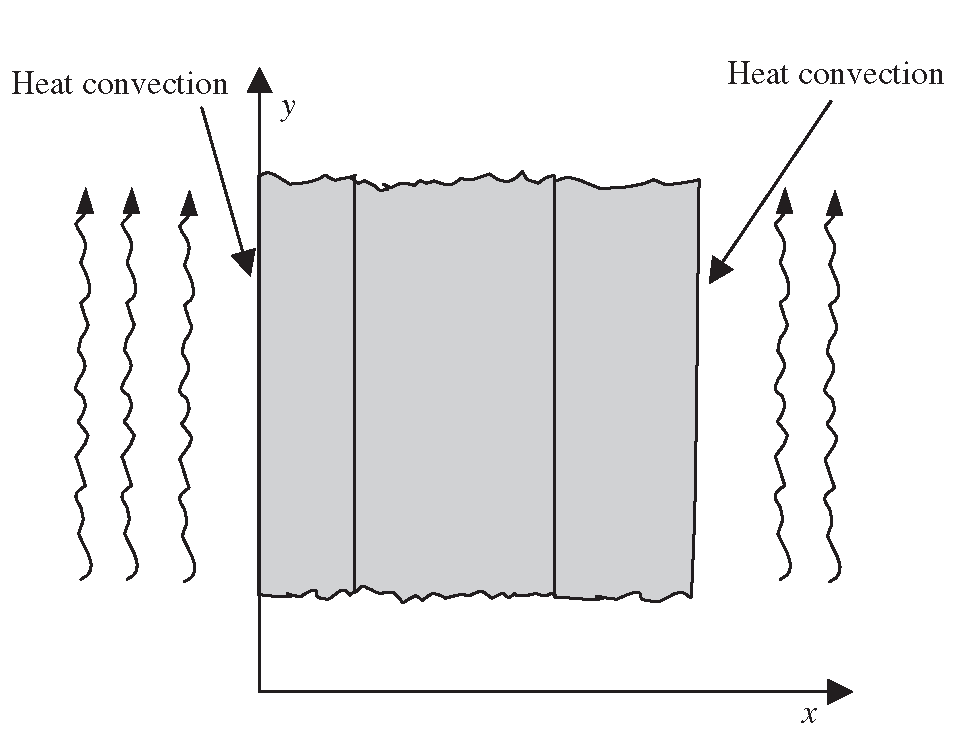
Figure 12.4. Heat transfer through a composite wall of three layers. Assume the temperature does not vary in the y direction.
Therefore, the system equation in this case is much simpler compared to that of the fin, and it governs only the heat conduction through the composite wall, which can be given by

where φ is the known temperature. Equation (12.9) can be written in a general form of Eq. (12.2) with
![]()
Torsional Deformation of a Bar
For problems of torsional deformation of a bar with noncircular sections, the field variable will be the stress function φ that is governed by a Poisson’s equation,

where G is the shear modulus and θ is the given angle of twist. The stress function is defined by

Equation (12.11) can be easily derived in the following procedure. Consider pure torsional status where
![]()
Therefore, there are only two stress components, σχζ and σ^. Using Hooke’s law, we have

The relationship between displacement and the given angle of twist θ can be given by [Fung, 1965]:

Next, using Eqs. (2.4), (12.15), (12.14) and (12.12), we obtain

Differentiating Eq. (12.16) with respect to y and Eq. (12.17) with respect to x, and equating the two resultant equations, leads to Eq. (12.11).
It can be seen that Eq. (12.11) takes on the general form of Eq. (12.1), with
![]()
Ideal Irrotational Fluid Flow
For problems of ideal, irrotational fluid flow, the field variables are the streamline, ψ, and potential, φ, functions that are governed by Laplace’s equations

It can be seen that both Eqs. (12.19) and (12.20) take on the form of Eq. (12.1), with

Acoustic Problems
For problems of vibrating fluid in a closed volume, as in the case of the vibration of air particles in a room, the field variable, P, is the pressure above the ambient pressure, and is governed by Poisson’s equation

where w is the wave frequency and c is the wave velocity in the medium. The derivation of the above equations can be found in any topic on acoustics (e.g. see Crocker [1998]). It can be seen that Eq. (12.22) takes on the form of Eq. (12.1), with substitution of

The above examples show that the Helmholtz equation (12.1) governs many different physical phenomena. Therefore, a productive way to solve all these problems using the FEM is to derive FE equations for solving the general form of Eqs. (12.1) or (12.2). The following sections thus introduce the FEM as a general numerical tool for solving partial differential equations in the form of Eqs. (12.1) or (12.2). In applying the FEM equations, we focus mainly on heat transfer problems.
