Geoscience Reference
In-Depth Information
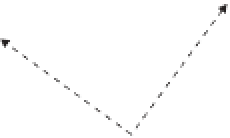
7.3 Freie Standpunktwahl
mittels Helmert-Transformation
X
P
1
NP
s
FS
P
n
P
2
Y
P
1
(
Y
1
,
X
1
)
P
2
(
Y
2
,
X
2
)
P
n
(
Y
n
,
X
n
)
Gegeben:
Koordinaten der Anschlusspunkte
,
Gemessen:
Polarkoordinaten der Anschlusspunkte
Richtungen
r
1
,
r
2
,
r
n
Horizontalstrecken
s
1
,
s
2
,
s
n
Polarkoordinaten für die Neupunkte
r
N
,
s
N
(
r
i
,
s
i
)
Koordinatensystem (
y , x
) mit Koordinatenursprung im Standpunkt FS
Umrechnung der gemessenen Polarkoordinaten
in ein örtliches rechtwinkliges
y
i
=
s
i
sin
r
i
x
i
=
s
i
cos
r
i
Berechnung der Koordinaten des Standpunktes
Transformation der Koordinaten des örtlichen
yx
-Systems in die Koordinaten eines
übergeordneten
YX
-Systems mittels einer Helmert-Transformation (siehe 8.1.3)
Schwerpunktskoordinaten
[
y
i
]
n
[
x
i
]
n
[
Y
i
]
n
[
X
i
]
n
y
S
=
x
S
=
Y
S
=
X
S
=
Reduktion auf den Schwerpunkt
[
Y
i
]
n
[
X
i
]
n
[
y
i
]
n
[
x
i
]
n
Y
i
=
Y
i
−
X
i
=
X
i
−
y
i
=
y
i
−
x
i
x
i
=
−
n = Anzahl der identischen Punkte
Transformationsparameter
x
i
Y
i
−
y
i
X
i
x
i
X
i
+
y
i
Y
i
o
=
a
=
x
i
2
y
i
2
x
i
2
y
i
2
+
+