Geoscience Reference
In-Depth Information
Abb. 4.112
Diagramm
der Geschwindigkeits-
vektoren bei der Moving
Boat-Methode
Bewegungsrichtung
des Bootes
Messpfad
V
b
α
V
V
r
Fließrichtung
2. Bei dieser Vorgehensweise wird die Bootsgeschwindigkeit
v
b
direkt über eine
Zeit-Entfernungsmessung vom Ufer aus bestimmt. Hierbei geht man davon aus,
dass die Geschwindigkeit des Boots bei einem nicht zu langen Messpfad annä-
hernd kon stant ist. Dieses Verfahren kann auch auf Teilabschnitte des Quer-
schnitts verfeinert werden. Zur Geschwindigkeitsberechnung wird Gl. (4.69)
eingesetzt. Eine Winkelmessung ist bei diesem Verfahren nicht erforderlich.
3. Es werden nur die Bootsgeschwindigkeit
v
b
und der Winkel
α
messtechnisch
erfasst. Bei diesem Verfahren ist die simultane Messung der Gewässertiefe
wesentlich.
Die Fließgeschwindigkeit
v
ergibt sich dann zu
(4.70)
v
=
v
b
·
tan
α.
Bei dieser Methode wird keine explizite Fließgeschwindigkeitsmessung durchge-
führt; das Boot fungiert sozusagen als „Schwimmer“.
Die Darstellung der Geschwindigkeitsvektoren in Abb.
4.112
verdeutlicht die ein-
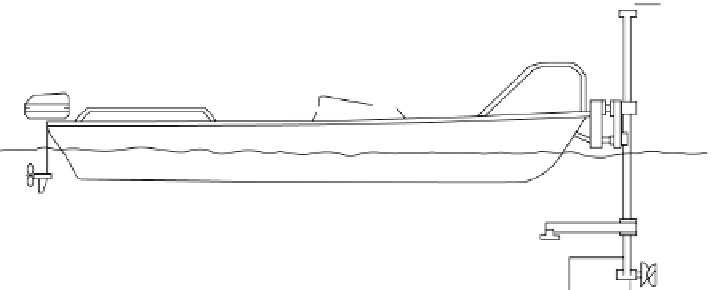
zelnen Verfahren. Die erforderliche Messausrüstung für die Moving Boat-Methode
ist aus Abb.
4.113
ersichtlich.
Winkelanzeiger
α
Sensor
Steuer
V
r
Messflügel
Abb. 4.113
Boot mit Messausrüstung für die Moving Boat-Methode. (Nach Hayes
1978
)




















Search WWH ::

Custom Search