Information Technology Reference
In-Depth Information
Our method
signatures - rs with move
100%
90%
80%
70%
60%
50%
40%
率
30%
20%
10%
0%
49
62
68
74
80
86
93 111 124 130 155 173 186
Resolution (centimeter)
Fig. 13.
Localization accurary in Experiment 1
4.2
Experiment 2: The Dynamic Environment
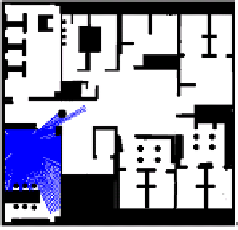
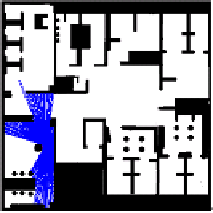
Dynamic environment means there is a new obstacle and the laser rangefinder
scanning information are different from the prior established on the map, such as
Fig. 14. Suppose the obstacle is a moving object within the scan area of the laser
range-finder, the robot will get a real-time feature. The dynamic environment contains
some dynamic information not in the pre-stored database. Here, we report 2 cases, in
which the first one contains 2.7% dynamic information and the second one contains
22% dynamic information. Fig. 15 and 16 shows the accuracy of global location of
our method and signature-rs. The average error is shown in Table 1. The average
localization error is less than 37.2 cm in the experiments. This distance is acceptable
for many robot applications, such as museum or store navigation.
b
a
Fig. 14.
a. An additional object appears at 434 cm. about 2.7% are affected. b. An additional
object appears at 62 cm. about 22% are affected.



























Search WWH ::

Custom Search