Information Technology Reference
In-Depth Information
Experiment 1 will test
criterion of our move track
one location after moving 1
t our method in a static environment. The terminat
king method is 15. That is, if the robot cannot converge
15 times, the algorithm will terminate and report fail.
tion
e to
4.1
Experiment 1: The
Static Environment
a . b.
c. d.
e. f.
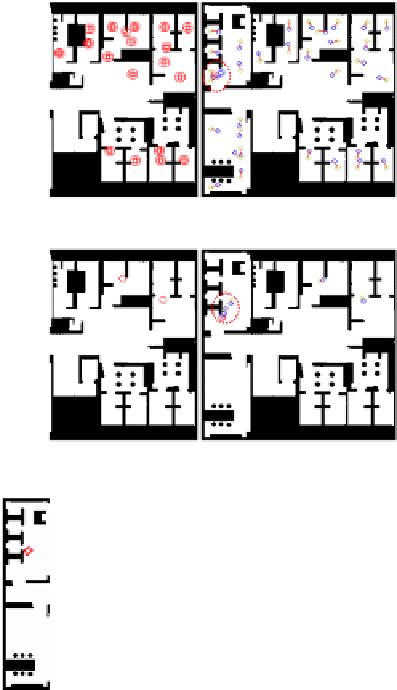
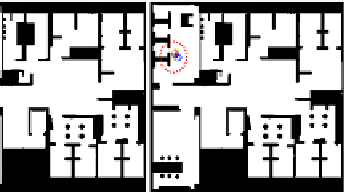
Fig. 12.
Ro
obot movement in the feature matching process
An example of move tra
each movement will filter
point. Fig. 13 shows the a
tests, each test with a rand
higher for a higher resolutio
acking method is shown in Fig. 12, from (a) to (f) wh
out some candidates and eventually converge to a corr
average accuracy of finding correct location, out of 10
dom position in the map. We can find that the accuracy
on (smaller distance between points).
here
rect
000
y is

Search WWH ::

Custom Search