Information Technology Reference
In-Depth Information
Our method
signatures - rs with move
100%
90%
80%
70%
60%
50%
40%
30%
20%
10%
0%
49
62
68
74
80
86
93
111
124
130
155
173
186
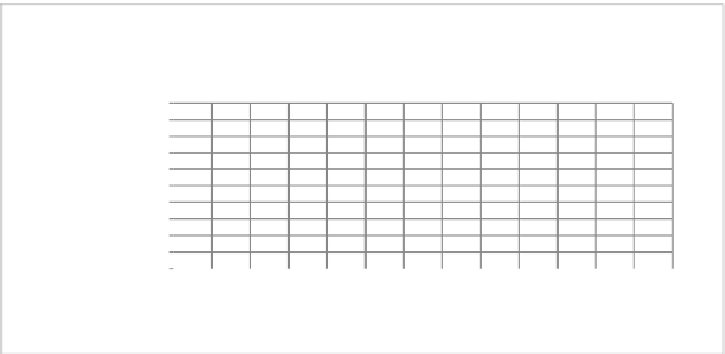
Fig. 15.
Localization accurary in Experiment 2, with 2.7% dynamic information
Our method
signatures - rs with move
100%
90%
80%
70%
60%
50%
40%
30%
20%
10%
0%
49
62
68
74
80
86
93
111
124
130
155
173
186
Resolution (centimeter)
Fig. 16.
Localization accurary in Experiment 2, with 22% dynamic information
Table 1.
Average Error (cm) of Robot Localization in Dynamic Environments
Distance of the
obstacle object
Distance of the
obstacle object
Distance of the
obstacle object
Resoluti
on
Resolu
tion
Resolu
tion
434cm
434cm
434cm
62 cm
62cm
62cm
49cm
18.6
86cm
24.8
130cm
31
24.8
31
37.2
24.8
24.8
37.2
62cm
93cm
155cm
31
31
37.2
68cm
24.8
111cm
31
173cm
37.2
31
37.2
37.2
74cm
24.8
124cm
31
186cm
37.2
31
37.2
37.2
80cm
24.8
31















































































Search WWH ::

Custom Search