Cryptography Reference
In-Depth Information
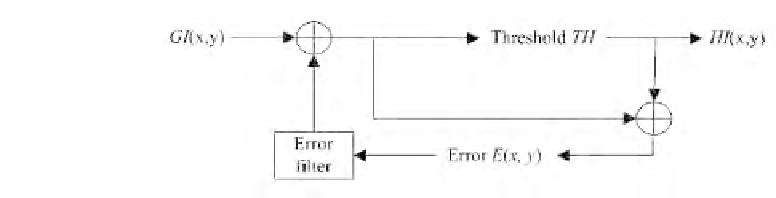
FIGURE 16.7
Error diffusion architecture.
FIGURE 16.8
The kernel weights of Floyd and Steinberg's error lter.
tion (5.8).
255; ifGI(x;y) TH
0;
HI(x;y) =
(16.7)
otherwise
E(x;y) = GI(x;y) HI(x;y)
(16.8)
Next, error E(x,y) is diffused over four neighboring pixels, GI(x, y+1), GI(x+1,
y-1), GI(x+1, y), and GI(x+1, y+1), according to Equation 16.9 and the kernel
weights (denoted as W) of the error filter are shown in Figure 16.8.
GI(x + i;y + j) = GI(x;y) + E(x;y) W;
(16.9)
where i;j 2f0; 1g, W 2f
16
;
16
;
16
;
16
g:
Based on Figure 16.8 and Equation 16.9, we can see that when pixels are
on the border of the grayscale image, special cases occur. The four kinds of







Search WWH ::

Custom Search