Biomedical Engineering Reference
In-Depth Information
point positions transformed according to the individual affine transformations.
For the transition from one non-rigid iteration to the next, the deformation is
taken as is and used as the starting point for the optimization.
11.4.3.3
Distance to the Average Shape
Let us recall the rationale behind the creation of our average shape atlas: by
minimizing the deformation required to map the atlas onto a given individual,
the segmentation accuracy would be improved. So does the atlas produced by
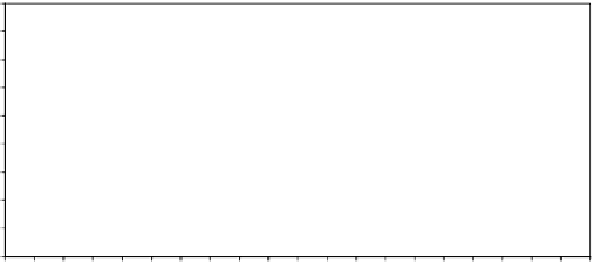
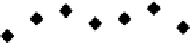
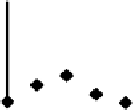
the method outlined above in fact minimize this deformation? Indeed, Fig. 11.9
illustrates that the differences between a raw image and an individual atlas are
on average substantially larger than the differences between a raw image and
the average atlas. Most raw images are more similar in shape to the average
shape atlas than to any (or at least the majority) of the remaining 19 individual
atlas images. Since the individuals registered to the average shape atlas were
the same that built the atlas in the first place, this finding is not too surprising.
However, it was important to show that at least for the “training set”, our shape
averaging does in fact produce a reasonable approximation to the population
average shape.
90
80
70
60
50
40
30
20
10
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Individual
Figure 11.9: Comparison of deformation magnitudes between subjects vs. be-
tween a subject and the average shape atlas. The diamonds show the average
deformation (over all foreground voxels) in
m when registering the respective
raw image to the average shape atlas. The vertical lines show the range of av-
erage deformations when registering the respective raw image to the remaining
19 individual atlas images. The boxes show the 25
th
and 75
th
percentiles of the
respective distributions.