Biomedical Engineering Reference
In-Depth Information
wise choice of the initial transformation is therefore beneficial for the robustness
of the registration method.
During the iterative averaging process, there are only minor changes in the
overall shape of the average brain from one iteration to the next. Consequently,
for all images
n
and all iterations
i
, the transformation
T
(
i
+
1
n
differs from the
preceding
T
(
i
n
only by a small additional deformation. A similar situation, al-
though for different reasons, is encountered when registering images from a
time series to a common reference; temporally consecutive images typically
differ from each other by a smaller amount than they differ from the common
reference. In the context of temporal image sequence registration, a framework
to incorporate deformations from previous steps into the current registration
was recently proposed [58, 59].
For the iterative average image generation described here, we follow a sim-
ilar approach. Our registration algorithm at each iteration takes as the ini-
tial transformation estimate the mapping found during the previous iteration
(Fig. 11.8). This is the mapping used to generate the current average image. For
the transition from affine to non-rigid registration, incorporation of the previ-
ous transformation is achieved by initializing the control point grid with control
Before Registration
After Registration
Register
Average
Image #1
Affine
Initialize
Register
1st Iteration
Non-Rigid
Average
Image #2
Initialize
Register
2nd Iteration
Non-Rigid
Average
Image #3
Initialize
Further Iterations
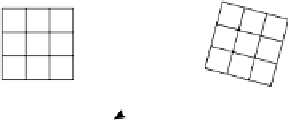
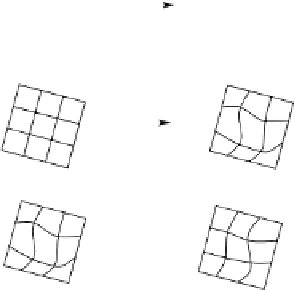
Figure 11.8: Propagation of transformations through the iterative shape averag-
ing algorithm. For each individual image, the transformation (affine or non-rigid)
used to generate the current average image is propagated to the next iteration
as the initial estimate for the next transformation [reproduced from [51]].