Biomedical Engineering Reference
In-Depth Information
two last calculated criterion values
E
. As a fallback strategy, the previous
step size is divided by
µ
f
, as above.
3.
Conjugated gradient.
This algorithm [59] chooses its descent directions
to be mutually conjugate so that moving along one does not spoil the result
of previous optimizations. To work well, the step size
µ
has to be chosen
optimally. Therefore, at each step, we need to run another internal one-
dimensional minimization routine which finds the optimal
µ
; this makes it
the slowest algorithm in our setting.
4.
Marquardt-Levenberg.
The most effective algorithm in the sense of the
number of iterations was a regularized Newton method inspired by the
Marquardt-Levenberg
algorithm (ML), as in [98]. We shall examine various
approximations of the Hessian matrix
∇
c
E
, see Section 9.4.8.1.
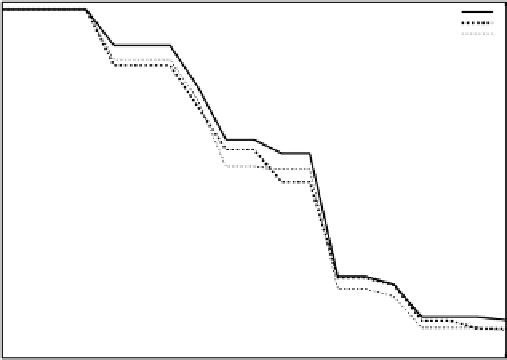
The choice of the best optimizer is always application-dependent. We ob-
serve that the behavior of all optimizers is almost identical at the beginning of
the optimization process (see Fig. 9.7). The main factor determining the speed
280
MLdH
MLH
GD
270
260
250
240
230
220
210
200
190
180
170
0
2
4
6
8
10
12
14
16
18
Figure 9.7: The evolution of the SSD criterion during first 18 iterations when
registering the Lena image, artificially deformed with 2
×
4
×
4 cubic B-spline
coefficients and a maximum displacement of about 30 pixels, without multireso-
lution. The optimizers used were: Marquardt-Levenberg with full Hessian (MLH),
Marquardt-Levenberg with only the diagonal of the Hessian taken into account
(MLdH), and gradient descent (GD). The deformation was recovered in all cases
with an accuracy between 0
.
1 and 0
.
01 pixels (see also section 9.4.10).