Biomedical Engineering Reference
In-Depth Information
is therefore the cost of a single iteration, which was smallest for the gradient de-
scent (GD) algorithm. Among the GD variants we recommend the quadratic step
size estimation that outperforms the classical feedback adjustment. One addi-
tional pleasant property of the GD algorithm is its tendency to leave uninfluential
coefficients intact, unlike the ML algorithm. Consequently, less regularization is
needed for the GD algorithm. We choose the GD optimizer for most of our image
registration tasks.
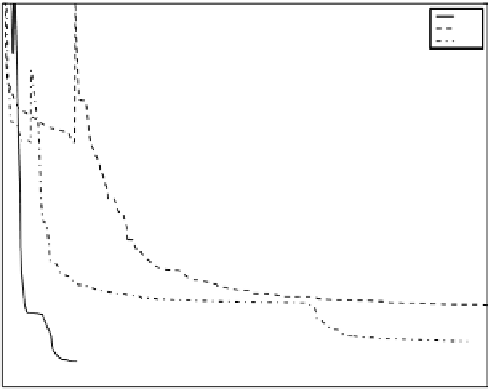
When, on the other hand, we work with a small number of parameters, the
criterion is smooth, and high precision is needed, the ML algorithm [36] performs
the best, as its higher cost per iteration is compensated for by a smaller number
of iterations due to the quadratic convergence (Fig. 9.8).
9.4.6.2
Multiresolution
The robustness and efficiency of the algorithm can be significantly improved by
a
multiresolution
approach: The task at hand is first solved at a coarse scale.
5
x 10
5
ML
GD
CG
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
0
50
100
150
200
250
300
350
400
450
500
time [s]
Figure 9.8:
Comparison of gradient descent (GD), conjugated gradient (CG),
and Marquardt-Levenberg (ML) optimization algorithm performances when reg-
istering SPECT images with control grid of 6
×
6
×
6 knots. The graphs give the
value of the finest-level SSD criterion of all successful (i.e., criterion-decreasing)
iterations as a function of the execution time. The abrupt changes are caused
by transitions between resolution levels.