Hardware Reference
In-Depth Information
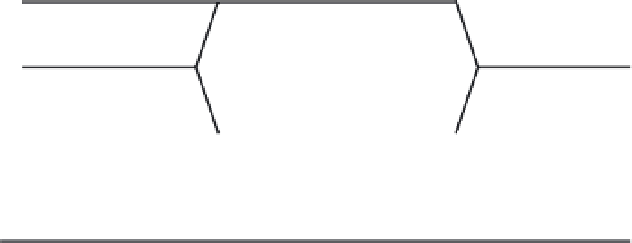
Voltage
5 V
CAN_H
3.5 V
2.5 V
CAN_L
1.5 V
0 V
Recessive
Recessive
Dominant
Figure 13.42
■
Nominal CAN bus levels
provide differential receive and transmit capabilities. The nominal CAN bus levels for the 5-V
power supply are shown in Figure 13.42.
Many semiconductor companies produce CAN bus transceivers. The Microchip MCP2551,
Philips PCA82C250/251, Texas Instruments SN65HVD251, and MAXIM MAX3050/3057
are among the most popular. All of these chips are compatible. TI SN65HVD251, Philips
PCA82C250, and Microchip MCP2551 are drop-in replaceable with each other.
The MCP2551 provides differential transmit and receive capability for the CAN protocol
controller (or module). It operates at speeds up to 1 Mbps. The MCP2551 converts the digital
signals generated by a CAN controller to signals suitable for transmission over the CAN bus
cabling. It also provides a buffer between the CAN controller and the high-voltage spikes that
can be generated on the CAN bus by outside sources, such as EMI, ESD, electrical transients,
and so on. The block diagram of the MCP2551 is shown in Figure 13.43.
The MCP2551 transceiver outputs will drive a minimum load of 45
, allowing a maxi-
mum of 112 nodes to be connected to the same CAN bus. The RxD pin reflects the differential
bus voltage between CAN_H and CAN_L. The low and high states of the RxD output pin cor-
respond to the dominant and recessive states of the CAN bus, respectively. The R
S
input allows
the user to select one of the three operation modes.
•
High speed
•
Slope control
•
Standby
The high-speed mode is selected by grounding the R
S
pin. In this mode, the transmis-
sion output drivers have fast output rise and fall times to support the high-speed CAN bus.
The slope-control mode further reduces the electromagnetic interference (EMI) by limit-
ing the rise and fall times of the CAN_H and CAN_L signals. The slope, or
slew rate
, is
controlled by connecting an external resistor (R
EXT
) between the R
S
pin and the ground pin.
Figure 13.44 illustrates typical slew rate values as a function of the slope-control resis-
tance value.
Ω


Search WWH ::

Custom Search