Graphics Reference
In-Depth Information
Ein Vektor
{a}
mit den drei Komponenten a
1
,a
2
,a
3
repräsentiert in der 3-dimen-
sionalen Geometrie im Allgemeinen Vektorkomponenten oder Punktkoordinaten.
Die in der Matrizenrechnung verwendeten Transformationen sind allerdings von
der Dimension (der Ordnung
n
) ganz unabhängig. Für die überschaubaren Fälle ist
n
D
3
der gesamte Raum,
n
D
2
eine Ebene und
n
D
1
eine Gerade.
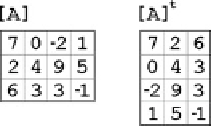
11.2.2 Transponierte Matrix
Vertauscht man von einer Matrix
[A]
m
;
n
die Zeilen mit den entsprechenden Spalten,
dann entsteht die zur Ausgangsmatrix transponierte Matrix
[A]
t
n
;
m
. Bei quadrati-
schen Matrizen entspricht dies einer Spiegelung an der Hauptdiagonalen. Bei einer
symmetrischen Matrix ist das Transponieren wirkungslos, weil die die k-te Zeile
mit der k-ten Spalte identisch ist.
t
t
.Œ
A
D Œ
A
.
s
Œ
A
/
/
t
t
D
s
Œ
A
t
t
t
.Œ
A
C Œ
B
/
D Œ
A
C Œ
B
11.2.3 Summe und Diferenz von Matrizen
Die Summe oder Differenz zweier Matrizen kann nur mit typgleichen Matrizen
gebildet werden, d. h., beide Matrizen müssen gleiche Anzahl Zeilen und Spalten
haben.
Œ
C
D Œ
A
˙ Œ
B
c
i
;
k
D
a
i
;
k
˙
b
i
;
k
für alle i und k
Œ
A
C Œ
B
D Œ
B
C Œ
A
.Œ
A
C Œ
B
/ C Œ
C
D Œ
A
C .Œ
B
C Œ
C
/
Œ
A
C 0 D Œ
A
Œ
A
Œ
A
D Œ
0