Graphics Reference
In-Depth Information
Spaltenweise Korrektur der homogenen Koordinate zu w
D 1
,
dies liefert die globalen Projektionskoordinaten
[P
G
0
]
,dann
Übergang von den Projektionskoordinaten des Globalsystems auf die Koordi-
naten der Projektionsebene mittels der Transformationsmatrix
[T
GV
]
(auf das
Mitführen der homogenen Koordinate wird hier verzichtet).
[T
GV
Œ
P
G
0
]
D
[P
V
]
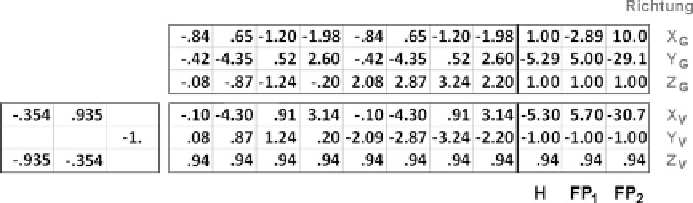
In diese Transformation einbezogen sind der Hilfspunkt
H
und die beiden
Fluchtpunkte
FP
1
und
FP
2
. Alle drei Punkte sind in globalen Koordinaten auf
der Projektionsebene definiert, deshalb genügt die Umrechnung in Projektions-
koordinaten. Für die
Y
V
-Richtung ergibt sich dabei genau die vorgewählte Höhe
h
über null und für
Z
V
den Abstand der Projektionsebene
.D
e
R
/
vom Ursprung.
Zu dieser Projektion mit gegebenen Fluchtpunkten sind die Komponenten des
Ortsvektors
f
b
g.10; 5; 1/
. Die folgende Projektion verwendet die gleichen Parame-
ter wie oben, allerdings liegt jetzt der Horizont bei h
D1
. Dies verändert
f
b
g
nur
mit b
z
D1
, die Komponenten b
x
und b
y
bleiben unverändert. Die Änderungen in
der zugehörigen Transformationsmatrix betreffen daher nur die 3. Matrixzeile:
Diese Darstellung mit einem sehr tief gelegten Horizont wird als Froschperspek-
tive bezeichnet (Abb.
8.41
). Der zweite Fluchtpunkt liegt außerhalb des Darstel-
lungsbereiches. Bei der hier verwendeten Projektionsebene parallel zur Z-Achse,
und deshalb mit n
z
D 0
des Normalenvektors
f
n
g
, verlaufen die Vertikalen weiter-
hin vertikal. Bei n
z
¤ 0
streben sie zu einem Fluchtpunkt in Richtung der Z-Achse.
Die Fluchtpunktgleichungen haben wir anfangs nach dem Ebenenparameter d
aufgelöst und über t
1
und t
2
die Lage der Fluchtpunkte auf dem Horizont vorgege-
ben, woraus sich schließlich der Ortsvektor
f
b
g
ergab. Häufiger ist der umgekehrte
Fall, dass nämlich der Ortsvektor gegeben ist und die Fluchtpunkte damit berechnet
werden.