Graphics Reference
In-Depth Information
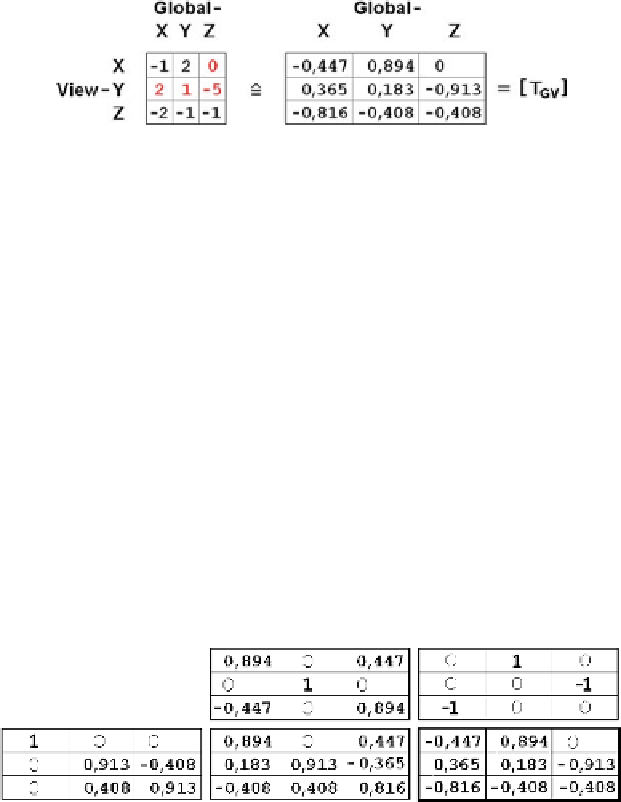
Für die z-Komponente der View-X-Achse wurde wieder der Wert 0 vorgegeben.
Damit bleibt die
X
V
-Achse horizontal und auch die Achsen
Y
V
und
Z
V
„passen“
bereits, was für die spätere Projektion von Vorteil ist. Auf diese Weise lässt sich
eine beliebige Projektionsrichtung festlegen.
Natürlich lässt sich die Transformationsmatrix
[T
GV
]
auch durch Drehen der
Ausgangskoordinaten ermitteln. Hierzu müssen die Drehachsen, die Reihenfolge
der Drehungen und die zugehörigen Drehwinkel bekannt sein und natürlich eine
Idee, was wohin zu drehen ist, um das gewünschte Ergebnis zu erreichen. Für die
Anschauung hilfreich ist ein (selbst gebasteltes) Koordinatendreibein.
In diesem Beispiel lassen sich die Dr
eh
winkel leicht aus den Achskomponen-
ten ermitteln: um
X
V
ist
' D
arctan
.1=
p
5/ D 24;095
ı
,um
Y
V
“ D
arctan
.1=2/ D
26;565
ı
. Beide Winkel sind negativ, weil entgegen der positiven Koordinatenachsen
gedreht wird. Zusätzlich werden die Koordinaten noch in das Viewsystem umgeord-
net mittels
[T
GV
]
; die drei Transformationen (siehe Abschn.
7.2.5
) sind hier hinter-
einander geschaltet. Das Ganze in Zahlen unter Beachtung der negativen Drehwin-
kel:
[T]
D
[R
'
]
[R
“
]
Œ
T
GV
]
Diese Transformationsmatrix
[T]
ist leider nicht ganz so übersichtlich zu bestim-
men wie bei Verwendung der Projektionsrichtung, wo sich alle Parameter ganz
automatisch ergeben. In Abschn.
8.2.1.2
kommen wir darauf zurück.
Abweichend von diesem Vorgehen wird das View- bzw. das Projektionskoordi-
natensystem in der Literatur meist durch einen UP-Vektor
f
v
up
g
definiert (Abb.
8.4
).
Die Projektionsrichtung ist hier ausnahmsweise mit
f
r
g
bezeichnet, um Ver-
wechslungen zu vermeiden. Der Normalenvektor der Projektionsebene ist
f
n
g
und
fällt mit der Projektionsrichtung
f
r
g
zusammen. Ein beliebiger UP-Vektor
f
v
up
g
liegt in der durch die Vektoren
f
r
g
und
f
r
z
g
aufgespannten Ebene. Die fehlenden
beiden Richtungen ergeben sich über die Vektorprodukte zu
f
u
gDf
n
gf
v
up
g
und
f
v
gDf
u
gf
n
g
. Das so definierte (UVN)-System ist um die
f
n
g
-Richtung um 180
ı