Graphics Reference
In-Depth Information
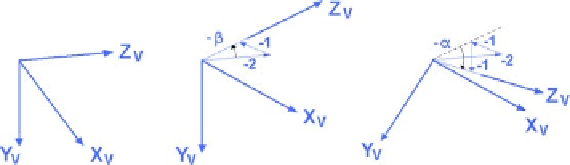
Abb. 8.3
Angabe einer beliebigen Projektionsrichtung
Die Vektoren dieser Transformationsmatrix werden natürlich noch zur Länge 1 nor-
miert und sind dann die Richtungscosinus des Viewsystems im Globalsystem.
Im Normalfall ist die Projektionsrichtung ganz beliebig und natürlich nicht an
die Position des Beobachters gebunden, hat also mit dessen Ortsvektor
f
b
g
nichts
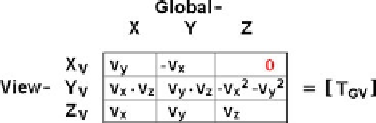
zu tun. Die Transformationsmatrix
[T
GV
]
für beliebiges
f
v
g
ist dann
wobei die
v
-Komponenten mit Vorzeichen des Globalsystems zu verwenden sind.
Im folgenden Beispiel (und allen anderen) transformieren wir stets von
Global
nach
View
auf der Basis von
[T
GV
]
und machen konsequent die Achse
Z
V
entsprechend
f
v
g
zur Projektionsrichtung.
Eine beliebige Projektionsrichtung lässt sich nun einfach angeben, indem man
geeignete Komponenten der Projektionsrichtung wählt (Abb.
8.3
).
Wir behalten
Z
V
wieder als Projektionsrichtung bei und drehen die
Z
V
-Achse,
bis der Beobachter auf das Objekt schaut. Dies erreicht man einfach durch Ändern
der
Z
V
-Richtung von
Z
V
.1; 0; 0/
z. B. nach
.2; 1; 0/
. Dies bedeutet eine nega-
tive Drehung um die Achse
Y
V
. Dieser Drehung folgt die Achse
X
V
mit den neuen
Komponenten
.1; 2; 0/
senkrecht zu
Z
V
. Nun wird noch die z-Komponente der
Z
V
-Achse geändert von 0 nach
1
und damit die Achse abgesenkt. Dies entspricht
einer weiteren negativen Drehung um die neue Achse
X
V
.DieAchse
Z
V
hat jetzt
die Komponenten
.2; 1; 1/
.
Mit den beiden (noch nicht normierten) Richtungsvektoren für
Z
V
und
X
V
lässt
sich nun die Achse
Y
V
als Vektorprodukt bestimmen:
f
Y
V
gDf
Z
V
g
x
f
X
V
g
.Das
View
system hat damit folgende Komponenten im Globalsystem (die zu Einheits-
vektoren normierten Komponenten nebenstehend):