Graphics Reference
In-Depth Information
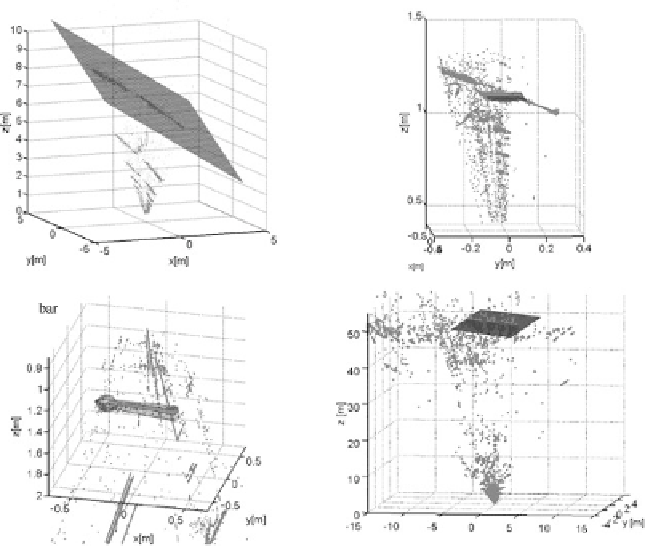
Fig. 1.27
0) in scene space along
with the adapted models, using the combined uniqueness and ordering constraint. (
a
) Scene 1
(fence with person). (
b
) Scene 2 (keyboard with hand). (
c
) Scene 3 (arm with bar). (
d
) Scene 4
(building with person)
Initial three-dimensional point clouds (corresponding to
λ
e
=
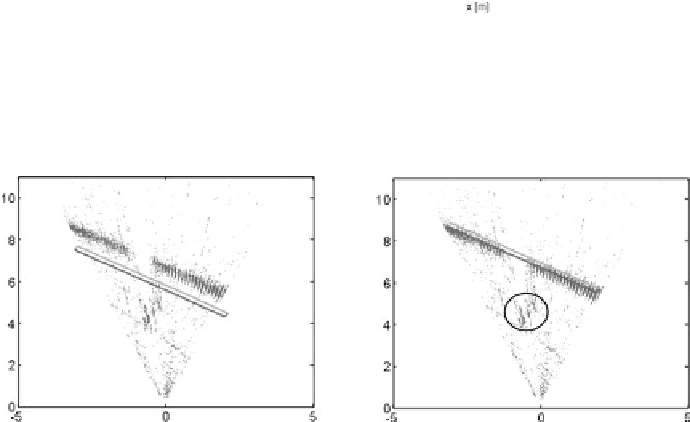
Fig. 1.28
Initialisation (
top
) and final result (
bottom
) for scene 1 of the model-based stereo
method. For comparison, the three-dimensional point cloud illustrates the result of the fea-
ture-based spacetime stereo algorithm described in Sect.
1.5.2.5
with
λ
e
0, where the three-di-
mensional points belonging to the person are marked by a
circle
. The depicted initial configuration
corresponds to the highest offset from the final solution for which convergence of the model-based
stereo algorithm is achieved. This approach does not capture the object in front of the scene part
displaying repetitive structures
=





















































Search WWH ::

Custom Search