Biomedical Engineering Reference
In-Depth Information
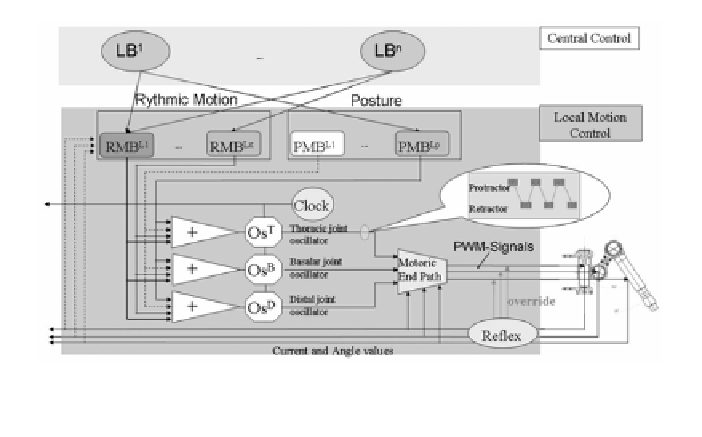
Figure 4
. The overall architecture for low-level actuation.
Figure 4 outlines the general idea. On the global level (light gray area), we
have implemented locomotion behaviors (LBs): typically forward, backward,
and lateral locomotion. These global behaviors are connected to all local leg
controllers and activate (with continuous strength) the local (single-leg) motion
behaviors. At the same time, they implement the inter-leg phase relation by set-
ting/resetting the local clocks. The local level (dark gray area) implements
rhythmic motion behaviors (RMBs) and postural motion behaviors (PMBs).
These behaviors simultaneously influence the amplitude and frequency (see
Figures 4 and 5) parameters of three oscillating networks: OS
T
, OS
B
, and OS
D
.
The oscillators are connected to a common clock, which is used for local and
global (in relation to other legs) synchronization. The oscillator output is a
rhythmic, alternating flexor and extensor stimulation signal (see callout box,
Figure 4), which is implemented as sine waves. This activation signal represents
the desired behavioral pattern, which is translated into pulse-width-modulated
(PWM) signals via the motor end path. In line with the output of the motor end
path is a set of perturbation-specific reflexes, which are implemented as "watch-
dogs." These reflexes override the signals on the motor end path with precom-
piled activation signals if the sensor information from the physical joints meets a
set of defined criteria. For example, if the current of a thoracic joint is above a
certain threshold during the swing phase, a reflex is triggered to move the leg
higher (for more details, see §4.1).
4.
RESULTS
This approach was implemented using inter-leg coordination data as ob-
served in real scorpions (3) and successfully tested on our "SCORPION" robot