Biomedical Engineering Reference
In-Depth Information
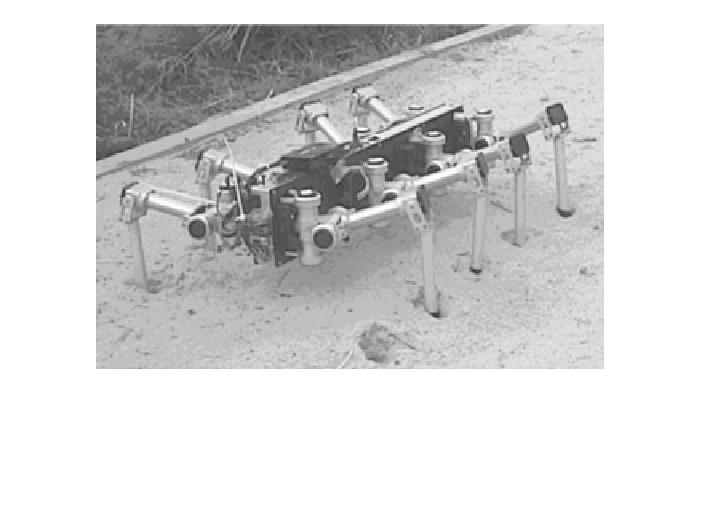
Figure 3
. The scorpion robot during autonomous exploration into a sand bed. The
beach-like sand bed was 3 m wide and 9 m long. The robot's feet penetrated the sand
by 3-5 cm. A reflex mechanism helped overcome obstacles.
nearly every species, even though the specific instantiations vary among species
to reflect individual kinematical characteristics in the animals.
The idea seems to be very promising as a concept to stabilize locomotion in
kinematically complex robotic systems (see Figure 3), as it resembles the divide-
and-conquer strategies reflected in nearly all solutions to complex control prob-
lems (4).
Another model for support of robust locomotion is provided by evolution in
the animal kingdom. This is the concept of reflex-based control (7). A reflex can
be viewed as a closed loop control system with fixed input/output characteris-
tics. In some animals, like the locust, this concept is said to actually perform
all locomotion control, and no further levels of control, like a CPG, are in-
volved (6).
Whether or not complex motion control can be achieved via only reflex
systems is subject to further discussion; however, the concept of a set of fixed,
wired reactions to sensory stimuli is of high interest to roboticists who aim to
gain stability in a system's locomotion.
The design of the control architecture described here was thus driven by
these two concepts. The CPG approach appeared to be interesting in generating
rhythmic walking patterns, which can be implemented in a computationally effi-
cient manner, while the reflex-driven approach seemed to provide a simple way
to stabilize these walking patterns by providing: (a) a set of fixed situation-
reaction rules to external disturbances, and (b) a way to bias leg coordination
among multiple independent legs (6).