Environmental Engineering Reference
In-Depth Information
Table 15.1 Summary of
Arduino Mega2560
characteristics
Arduino Mega2560
Microcontroller
ATmega2560
Operating voltage
5 V
Input voltage (recommended)
7-12 V
Input voltage (limits)
6-20 V
Digital I/O pins
54 (of which 15 provide
PWM output)
Analog input pins
16
DC current per I/O pin
40 mA
DC current for 3.3 V pin
50 mA
Flash memory
256 KB of which 8 KB
used by bootloader
SRAM
8 KB
EEPROM
4 KB
Clock speed
16 MHz
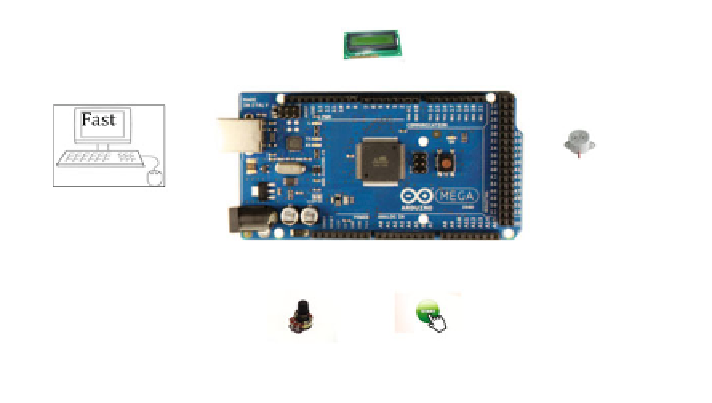
Fig. 15.2
Block diagram of the HIL experimental setup
15.2.3 Setup
The HIL allows control system hardware (Arduino) to be connected directly to
FAST simulations. The Arduino receives inputs from the potentiometer (reference
power, P
ref
) and the WT simulator (generator speed, x
g
) and outputs the torque
controller command to the WT simulator. The wind inflow for the simulation is
also given by FAST. A gain scheduled Proportional-Integral (PI) pitch control is
programmed in the WT simulator. Thus, only the torque controller is programmed
in Arduino.