Environmental Engineering Reference
In-Depth Information
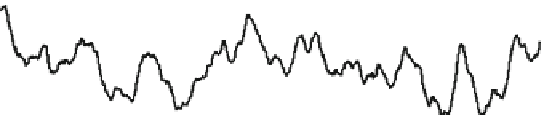
(a)
Optim al & actual
ω
g
90
85
80
75
70
65
60
Optimal
ω
g
55
Actual
ω
g
50
0
100
200
300
400
500
600
Tim e(s)
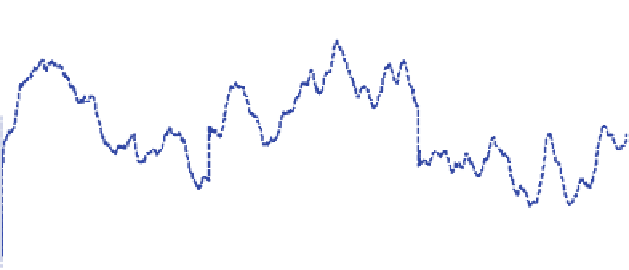
(b)
Optim al & a
c
tual
ω
r
1
Optimal
ω
0.95
r
Actual
ω
r
0.9
0.85
0.8
0.75
0.7
0.65
0.6
0
100
200
300
400
500
600
Tim e(s)
Fig. 7.14
0.9 sensor bias fault accelerate x
g
a and x
r
b
fault estimation and compensation of sensor faults from the input of PMIO. This
fact is clearly interpreted from the error signal
ð
y
a
C
a
x
a
Þ
which can be rewritten
, then as long as there are no sensor faults, f
s
¼
0.
However, once a sensor fault occurs the fault estimation f
s
compensates the effect
of the fault signal f
s
and hence the observer always receives a fault-free error
signal.
as Cx
þ
Df
s
C
^
x
Df
s