Hardware Reference
In-Depth Information
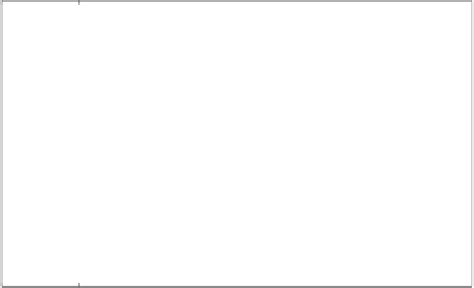
1.2
1
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
x 10
−3
Time (secs)
Figure 3.89: Closed-loop system step response.
Figure 3.90: DMS configuration.
dB gain crossover occurs at 500 Hz for the VCM (K
V
P
V
)loopandat2kHz
for the PZT loop. Figure 3.91 and Figure 3.92 show the results. We observe in
Figure 3.91 a 76
◦
phase lag at 2 kHz for the PZT path, whereas the gain and
phase of the VCM path at 2 kHz are 0.65 dB and 177
◦
, respectively. With the
addition of the PZT loop in the compensation of the VCM, the gain becomes
9.42 dB and the phase delay becomes 170
◦
at 500 Hz. Overall, the combined
dual-loop has a gain of about 1.08 dB and a phase delay of 68
◦
at 2 kHz. The
phase margin is about 69
◦
considering the gain drop. The overall bandwidth
is slightly higher than the bandwidth of the microactuator path.
Actuator Saturation and Phase Margin
One important design consideration for the dual-stage actuator is to suitably
allocate the control signals between the VCM and microactuator. It is, there-
fore, natural to examine the dependence of control system's performance on
the saturation level of the microactuator. Let us limit the displacement of the