Hardware Reference
In-Depth Information
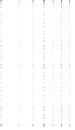
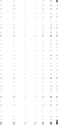
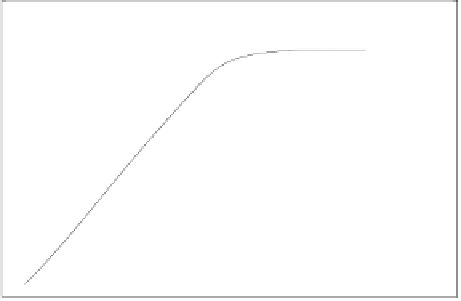
2−stage open loop−decoupled−master slave
80
60
40
20
0
−20
10
2
10
3
10
4
−50
−100
−150
−200
10
2
10
3
10
4
Frequency in Hz
Figure 3.91: Open loop transfer function. Solid line: combined loop, dash-dot
line: VCM path, dashed line: PZT path.
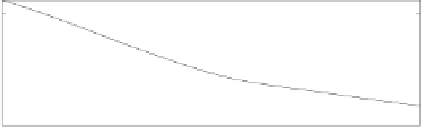
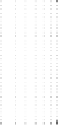
2−stage closed loop−DMS
20
0
−20
−40
−60
−80
−100
10
1
10
2
10
3
10
4
10
5
Freq. in Hz
Figure 3.92: S (solid) and T (dashed) for DMS structure.
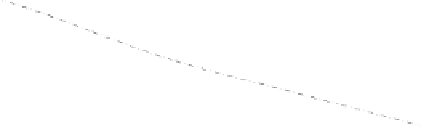
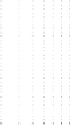
secondary stage actuator to ±8 micro inches (µin) to investigate the possible
problems due to the saturation in the secondary stage actuator. Figure 3.93
to 3.95 show the step responses of the dual-stage servo for step changes in ref-
erence by 8, 16, and 21 µin, respectively. It takes about 0.7 ms, 0.75 ms, and
1.7 ms, respectively, for the step responses to settle in these 3 cases, whereas,
the overshoots of the combined output are approximately 44%, 87% and 100%,
respectively.
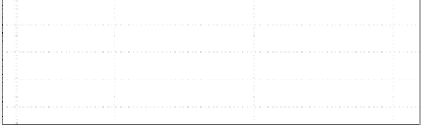
It is interesting to note that in the linear control case shown in Figure 3.95,
the gain margin (GM) of C
V
P
V
was 9.5 dB. The maximum stable step change
of 21 µin was about 20× log
10
(
2
8
)=8.5 dB. Assume that a 1 dB gain margin