Hardware Reference
In-Depth Information
1.4
1.2
b
0
P(s)1(t) +b
1
P(s)1(t−T
fir
)
1
0.8
b
0
P(s)
0.6
0.4
b
1
P(s)
0.2
0
0
5
10
15
20
25
30
time in sec
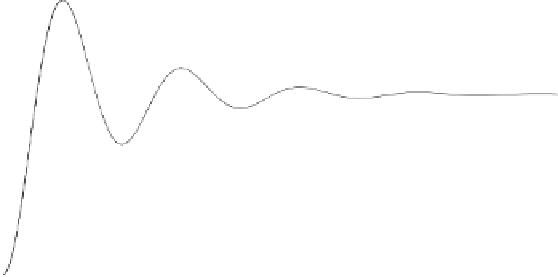
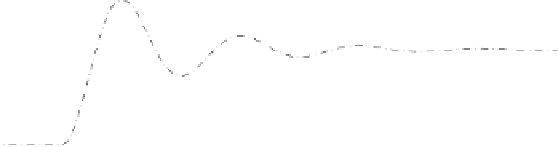
Figure 3.39: Step response of a second order model with flexible modes con-
trolled by a input shaper.
also be achieved in presence of control saturation using time varying feedback
control gain. See for reference, the workds presented in [30], [230], [127] and
the references therein.
3.5.2
Initial Value Compensation
In order to meet the stringent specifications of both track following and track
seek, it is better to design two controllers independently so that each controller
can be optimally tuned to address specific issues. While designing the track
following controller, the initial states of the plant and controller are usually
assumed to be zero. However, when the control is transferred from the seek
mode to track-following mode, the final states at the end of the seek controller
are not necessarily zero. If proper care is not taken, continuity of the control
signal at the time of mode switching is not ensured. This is not desirable as it
excites the resonant modes of the actuator and, as a consequence, time taken
for the head to settle on the track is extended. Possible solution lies in the
compensation of the initial states included in the track following mode.
Let us consider again the plant G
p
and controller G
c
showninFig.3.37
where the command input signal r = 0, the output of the system with non-zero
initial states is given by:
y =
N
p
D
X
p
(0) +
N
c
D
X
c
(0) +
N
a
D
a
(3.68)
where N
a
/D is the transfer function between signal injection point a and y,