Hardware Reference
In-Depth Information
1.6
T
d
= 0.5
1.4
T
d
= 1.0
1.2
T
d
= 2.0
T
d
= 4.0
1
T
d
= 0.5 with I
S
0.8
0.6
0.4
0.2
0
0
2
4
6
8
10
12
Time in second
K
p
(1+T
d
s)
s
2
+K
p
(1+T
d
s)
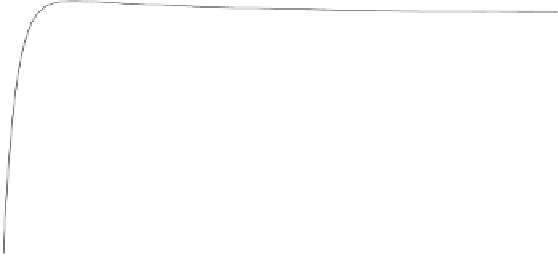
Figure 3.38: Step response of
for K
p
=1withdifferent values of
T
d
.
not the zeros. Hence feedforward control and/or input shaping can be designed
to affect the tranmission zeros as well as poles to achieve the desired step re-
sponses. In other words, we design the feedback control ler to achieve accurate
track following via suppression of vibration and sensing noise, and design the
feedforward control and/or input shaping to achieve desirable step responses.
The later is not a feedback control design problem and hence the stability issue
is of less concern.
One special way of designing command input shaper for lightly damped
systems is to apply two successive step changes instead of one such that the
oscillations from the two step changes cancel each other. This method was
first reported by N. Singer and W. Seering to eliminate the ringing effects in
lightly damped system [176]. Hai T. Ho presented in [82] the application of this
method in HDD fast servo bang-bang control. Figure 3.39 gives an illustrative
example of the outcome. For this example, the plant transfer function is P(s)=
ω
n
−1
with
s
2
+2ζω
n
+ω
n
. Command shaping is realized using an FIR filter b
0
+ b
1
z
−
ζπ
√
1
−ζ
2
.
The simulation is carried out with ω
n
=1,ζ =0.2, T
fir
=3.2064, b
0
=0.6550,
b
1
=0.3450, K =0.5266. It is clearly seen that the oscillations from the two
substeps cancel each other. The combined step response is no longer oscillatory
even though the plant model is lightly damped.
Besides the PTOS explained in chapter 2 and the two degree-of-freedom
controller with command shaping, fast step response without overshoot can
√
π
1
K
delay time T
fir
=
1−ζ
2
where b
0
=
1+K
,b
1
=
1+K
,andK = e
ω
n