Hardware Reference
In-Depth Information
160
140
120
100
80
60
40
10
0
10
1
10
2
10
3
10
4
10
5
10
6
0
−100
−200
−300
10
0
10
1
10
2
10
3
10
4
10
5
10
6
Frequency (rad/s)
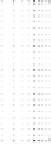
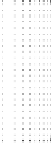
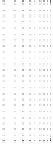
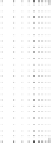
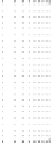
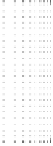
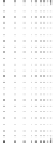
Figure 3.11: Shock transfer function corresponding to Figure 3.8. Solid line:
no resonance. Dashed-line: with resonance compensator.
of the closed loop system.
Hard disk drives are mass produced systems and the actuators are also mass
produced. So the physical properties of the actuators from the same batch of
production may have slightly different frequencies and damping factors of their
resonant modes. If a notch filter is designed to cancel one particular frequency
of resonance, it may not suit well for all actuators in that batch causing imper-
fect cancelation of resonant modes for some. Such in-exact cancelation of the
resonant modes may cause sustained oscillation in the closed-loop. Robustness
of the compensator must be analyzed and examined carefully.
One possibile solution for this problem is to use a notch filter whose center
frequency and width of the notch can be easily modified. From this point
of view, digital notch filters are prefered over their analog counterparts. The
parameters of a digital filter and, therefore, its properties can be changed easily.
These filters are easily implementable in the firmware of the microprocessor
used in digital control system or even using programmable digital hardware.
One can substitute s in equation (3.17) with s =
T
s
z
−
1
z+1
asindicatedinequation
(3.1) to find the digital version of the notch filter. Many design softwares
provide appropriate functions to convert an analog filter into a digital filter.
For example, the command
c2dm
of MATLAB
TM
can be used to convert a
continuous-time LTI (Linear Time Invariant) systems to equivalent discrete-
time LTI system. One can use either a zero-order hold (ZOH), or a first-order
hold (FOH) for plant discretization with this MATLAB function, and use the
bilinear (Tustin) approximation to discretize the controller.