Hardware Reference
In-Depth Information
1.5
1
0.5
0
0
0.5
1
1.5
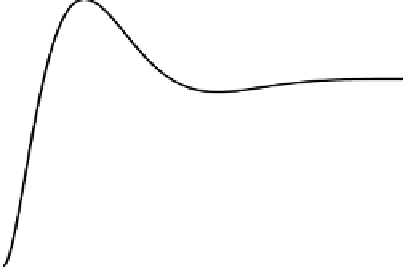
Time (ms)
Figure 3.12: Closed-loop step response corresponding to Figure 3.8.
As mentioned in chapter 2, the sampling frequency used for HDD servo-
mechanism is always a compromise between the demand for higher sampling
frequency and limitations imposed by the rotational speed of the disks and
the number of servo sectors used. If the Nyquist frequency for PES sampling
is lower than the critical resonant frequency, a digital notch filter can not be
designed using the same sampling frequency. In such situation, the notch filter
as well as the controller can be discretized and implemented using a sam-
pling frequency twice or more than the PES sampling frequency. This results
in a multi-rate system [204], where the PES is sampled at the pre-defined
sampling frequency but the compensator is implemented at a higher rate. An-
other advantage of the multi-rate implementation is the reduction of phase
delay introduced by digital compensator. Additional phase delay caused by
the implementation of a digital filter can be easily visualized with the help of
a sinusoidal signal. If a continuous-time sine wave is sampled first and then it
is reconstructed from the samples using a ZOH, the reconstructed continuous-
time signal is a sine-like function with discontinuous step. The reconstructed
signal has its fundamental frequency same as that of the input sine wave but
is delayed from the input by half of the sampling interval [54]. In a multi-rate
system, since the controller is implemented at a higher sampling frequency, the
delay introduced by sampling is reduced.
The evaluation of the magnitude and phase of a discrete transfer function
H(z) can be done by evaluating the transfer function for different values of z
lying on the unit circle, that is by substituting z by e
jωT
andthenevaluating
it for different values ω,
magnitude =
|H(z)|
e
jωT
,
(3.22)
phase =
H(z)|
e
jωT
.
(3.23)