Civil Engineering Reference
In-Depth Information
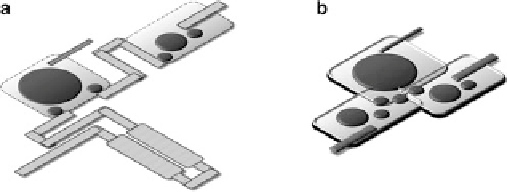
Abb. 9.17
Unterschiedlich
verkettete Maschinen, B4
Kenntnisse und Erfahrungen notwendig. Im Folgenden werden spezielle Anforderungen
an ausgewählten Beispielen diskutiert.
Lose und feste Verkettung
BeispielB4
zur Abstraktion betrachtet die Abbildung fest ver-
ketteter bzw.
geblockter
Maschinen zum aseptischen Formen, Füllen und Verschließen von
Zielt die Simulation darauf, die Realität eines
Aseptikblockes
transparent darzustellen,
also den Unterschied zwischen der losen (a) und festen Verkettung (b) im dynamischen
Verhalten undderAnlagenproduktivität aufzuzeigen, soistdie explizite Modellierungaller
Maschinen mit deren jeweiligen Detailparametern notwendig. Im Ergebnis einer derarti-
gen Simulation können die Vorteile und Nachteile der geblockten aseptischen Abfüllanlage
quantitativ und im Detail diskutiert werden. Sieht die Aufgabenstellung aber gar keine
Alternative zur festen Verkettung vor, sondern soll untersuchen, wie sich eine gesamte
Mehrweganlage verhält, die eben diesen Block einschließt, so sollte die Form-, Füll- und
Verschließmaschine als ein einziges Anlagen- bzw. Modellelement abgebildet werden. Im
Ergebnis der Simulation wird keine detaillierte Aussage zum Aseptikblock, wohl aber zur
Gesamtdynamik und Leistungsfähigkeit der Mehrweganlage möglich.
Auch für die in Abschn.
9.4
speziell betrachtete Untersuchung des Speichereinsatzes ist
die richtige Abstraktion sowohl aufwands- als auch erfolgsentscheidend. Während bei ei-
nem Großteil der Simulationsstudien ein Speicher als einfaches Element (eine zuführende
Verbindung und eine abführende Verbindung) modelliert wird, zeigt Abb.
9.18
ein reprä-
sentatives
Beispiel B5
, bei dem der Speicher in der Realität und im Modell eine Zusam-
menschaltung von Transportstrecken ist und in das Gesamtsystem über drei zuführende
Sammelelemente und drei abführende Verteilelemente verkettet ist (reale Anlagenelemen-
Zum Einsatz von Roboterzellen
Eine analoge und aktuelle Fragestellung ergibt sich zur
Abbildung von
Roboterzellen
. Soll untersucht werden, wie viele parallele Roboter, z. B. Pi-
cker, benötigt werden, um eine bestimmte Produktmenge pro Zeit zu sortieren oder in eine
Packung zu setzen, so muss jeder Roboter explizit als Element abgebildet werden, auch