Geoscience Reference
In-Depth Information
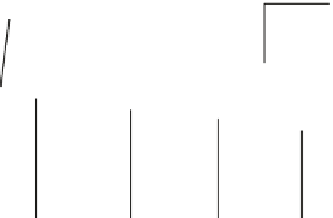
Messvolumen
Messkopf
1
2
3
Messabschnitte
Abb. 5.93
Messprinzip des horizontalen Ultraschall-Doppler-Verfahrens
deten Messfrequenz des eingesetzten Sensors, aber auch vom Gewässerprofil,
den Inhaltsstoffen des Wassers wie Salz, Schwebstoff etc. abhängt. Wie bei den
mobilen Ultraschall-Doppler-Geräten gilt allgemein: je niedriger die Messfre-
quenz, desto höher ist die Reichweite, wie Tab.
5.12
belegt.
Die
Ultraschallwandler
dieser angebotenen Messsysteme haben i. d. R. zwei Sen-
soren, die das keulenförmige Messvolumen aufspannen; je nach Hersteller und ört-
lichen Gegebenheiten werden heute Sensoren mit Frequenzen zwischen 300 kHz
und 2 MHz angeboten. Abb.
5.94
zeigt eine Zusammenstellung von Sensoren für
Horizontal-Ultraschall-Dopplersysteme verschiedener Hersteller.
Unterschiedlich bei den verschiedenen Fabrikaten ist die Anzahl der Messzellen,
die das eigentliche Messvolumen aufbauen; sie kann variieren zwischen 9 und 128
Messzellen. Zu beachten ist das für Ultraschallmessgeräte typische „Blanking“, wel-
ches dazu führt, dass im unmittelbaren Bereich (1-2 m) des Sensors gerätespezifisch
keine Messungen möglich sind; in Abb.
5.93
ist dieser Bereich eingezeichnet. Um die
für die jeweilige Fragestellung „richtige“ Gerätekonfiguration zu ermitteln, bedarf es
einer vorhergehenden intensiven Messstellen-Evaluierung, da bei der Auswahl des
Messsystems eine ganze Reihe von physikalischen und hydraulischen Randbedingun-
gen erfüllt sein muss. Die Wesentlichen sollen im Folgenden vorgestellt werden.
5.5.4.3
Messstellen-Evaluierung
1.
Physikalische Randbedingungen:
Um zu vermeiden, dass die Schallkeule weder an der Wasseroberfläche noch
an der Sohle reflektiert wird, sollte ein bestimmtes Verhältnis von Breite und
Tab. 5.12
Max. Reich-
weite in Abhängigkeit von
der Messfrequenz und dem
Öffnungswinkel (= Winkel
zur Hauptachse). (Nach Ott
Messtechnik)
Messfrequenz
[MHz]
Öffnungswinkel
[°]
Reichweite
[m]
0,6
2,0
80
1,0
2,3
25
2,0
1,8
10











Search WWH ::

Custom Search