Geoscience Reference
In-Depth Information
Su
Ts
Ba
Su
Ts
Fi
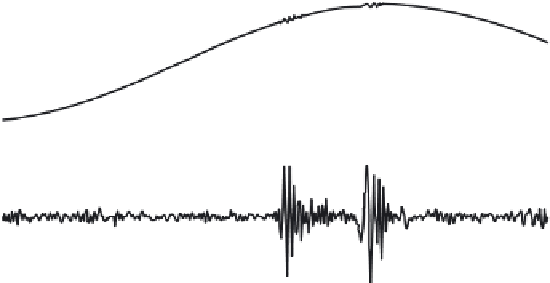
Fig. 5.1 Example of tsunami registration in open ocean by bottom pressure sensor (Adapted from
[Milburn et al. (1996)])
The linear theory of long waves, representing the most simple version of a theory
of gravitational surface waves on water, serves as quite an applicable approximation
for describing the process of tsunami propagation in the open ocean along short
routes. But, when waves cover long distances, dispersion and non-linear effects that
exhibit the property of accumulating are capable of essentially altering not only
the amplitude, but the very structure of the wave perturbation, also.
Manifestations of phase dispersion are well observed in measurements of
tsunami waves in the open ocean by bottom pressure sensors. In Fig. 5.1 the exam-
ple is presented of a record of ocean-level variations occurring during the passage
of a weak tsunami, caused by an underwater earthquake in Alaska bay on March 6,
1988 [Milburn et al. (1996)]. The distance between the earthquake epicentre and
the registration point was 978 km. The upper part of the figure shows the original
record, in which tidal oscillations of the level prevail. The lower part of the figure
presents the filtered signal, from which the tidal component has been removed. From
the record two groups of waves are well distinguished. The first group, taking effect
practically immediately after the earthquake, represents the response of the pressure
sensor to the surface seismic wave. The second group of waves, delayed by over
an hour, represents oscillations of the ocean level due to passage of the tsunami.
From the tsunami record it is well seen that at the beginning there are long-period
components of the signal, and only subsequently there appear short-period oscilla-
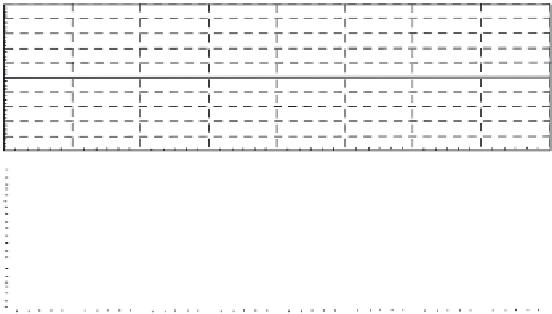
tions. This fact is established well by spectral-time analysis, the results of which
are shown in Fig. 5.2. The spectral composition of the signal not only changes
with time, but the behaviour of these changes satisfy the dispersion law for gravi-
tational waves on water [Kulikov, Gonzalez (1995)]. The dispersion law is shown
in the figure by the solid line, calculated by formula
t
(
)=
L
C
gr
(
ω
ω
), where
L
is the distance from the sensor to the earthquake epicentre,
C
gr
(
ω
) is the group
ω
velocity, which is a function of the cyclic frequency
.