Geoscience Reference
In-Depth Information
tropospheric and ionospheric errors, multipath, and integer ambiguities. These are usually removed
by differencing mode of GPS data processing (see Section 9.7.1.2), by empirical modeling (tropo-
sphere), or by the processing of dual-frequency signals (ionosphere). As already mentioned, ambi-
guities must be resolved prior to users' position estimation with carrier phase measurements.
Equation (9.1) through Equation (9.3) are parameterized in terms of Cartesian geocentric coor-
dinates X, Y, Z; however, after the positioning solution is obtained, Cartesian coordinates can be
converted to geodetic latitude, longitude, and height, which represent an equivalent triplet of coor-
dinates. Because GPS is a geometric system, its coordinates are related to a reference ellipsoid
(WGS84 ellipsoid), whose semimajor axis and flattening are needed to convert Cartesian to and
from geodetic coordinates (Torge, 1980). Since GPS provides heights above the WGS84 ellipsoid, in
order to convert these heights to topographic (orthometric) heights, a geoid undulation (geoid-ellip-
soid separation) must be used. National Geospatial-Intelligence Agency (NGA) provides an online
service that calculates geoid undulation for a given location using the latest NGA geoid model
(http://earth-info.nga.mil/GandG/wgs84/gravitymod/wgs84_180/intptW.html). For more informa-
tion on geoid and height conversion, the reader is referred to Torge (1980).
9.7 poSItIonInG WIth GpS
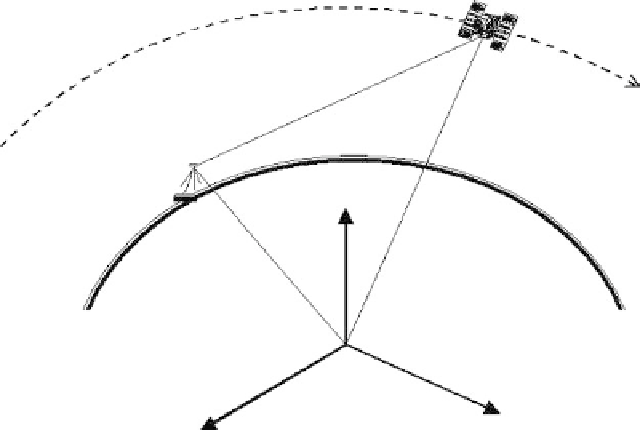
The main principle behind positioning with GPS is triangulation in space, based on the measure-
ment of a range (pseudorange or phase-range) between the receiver and the satellites (Figure 9.10).
Essentially, the problem can be specified as follows: given the position vectors of GPS satellites
(such as ρ
s
of satellite
s
in Figure 9.10) tracked by a receiver
r
, and given a set of range measurements
(such as,
P
r
s
) to these satellites, determine a position vector of the user, ρ
r
. A single range measure-
ment to a satellite places the user somewhere on a sphere with a radius equal to the measured range.
Three simultaneously measured ranges to three different satellites place the user on the intersection
of three spheres, which corresponds to two points in space. One is usually an impossible solution
that can be discarded by the receiver. Even though there are three fundamental unknowns (coor-
dinates of the user's receiver), the minimum of four satellites must be simultaneously observed to
provide a unique solution in space (see Figure 9.1 in Section 9.2), as explained next.
X
s
, Y
s
, Z
s
GPS satellite trajectory
P
r
X
r
, Y
r
, Z
r
ρ
s
Z
ρ
r
O
Y
X
fIGURe 9.10
Range from satellite
s
to ground receiver
r
.