Geoscience Reference
In-Depth Information
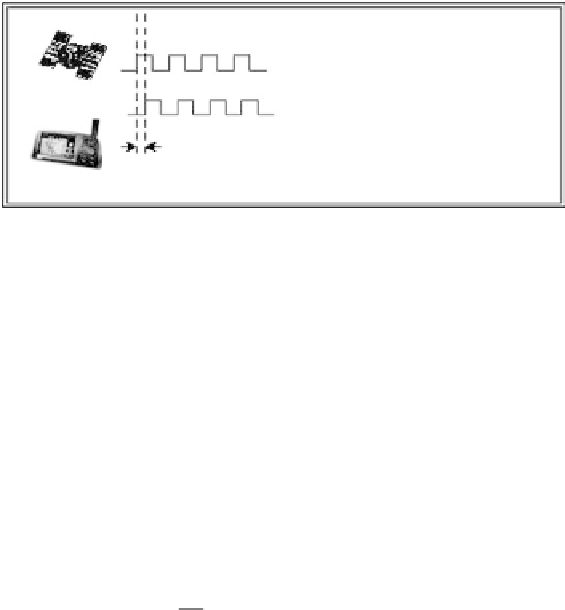
Code received from GPS satellite
Code replica generated inside GPS
receiver
Δt
Range distance = cΔt
fIGURe 9.8
Principles of pseudorange measurement based on time observation.
There are two types of pseudoranges: C/A-code pseudorange and P-code pseudorange. The
precision of the pseudorange measurement is partly determined by the wavelength of the chip in
the PRN code. Thus, the shorter the wavelength, the more precise the range measurement would
be. Consequently, the P-code range measurement precision (noise) of 10 to 30 cm is about ten times
higher than that of the C/A code. Under the Anti-Spoofing policy, the P-code is encrypted to Y-code,
as already explained, resulting in more complicated signal recovery on L2 frequency. Because there
is no C/A code on L2, signal correlation, as explained above, does not work anymore, as the receiver
cannot generate a replica of the unknown Y-code. Consequently, more sophisticated signal tracking
techniques must be used (see, for example, Ashjaee, 1993).
The pseudorange observation can be expressed as a function of the unknown receiver coordi-
nates, satellite and receiver clock errors, and the signal propagation errors (Equation (9.1)):
s
I
f
s
s
r
s
s
s
s
P
=+++ −++
ρ
Tcdt
(
dt
)
Me
r
,
1
r
r
r
r
,
1
r
,
1
2
1
(9.1)
s
I
f
r
P
s
=+++ −++
ρ
s
Tcdt
s
(
dt
s
)
Me
s
s
r
,
2
r
r
r
r
,
2
r
,
2
2
2
where
2
2
2
( )
+
( )
+
( )
ρ
s
s
s
s
(9.2)
=
sqrt
XX
YY
ZZ
r
r
r
s
s
PP
r
,
2
:
Pseudoranges measured between receiver
r
and satellite
s
on L1 and L2
,
1
r
,
ρ
s
:
Geometric distance between satellite
s
and receiver
r
s
s
I
f
I
f
r
r
,
:
Range error caused by ionospheric signal delay on L1 and L2
2
2
1
2
dt
r
:
The
r-th
receiver clock error (unknown)
dt
s
:
The
s-th
satellite clock error (known from the navigation message)
c
:
The vacuum speed of light
s
s
MM
r
,
:
Multipath on pseudorange observables on L1 and L2
,
1
r
,
2
T
r
s
:
Range error caused by tropospheric delay between satellite
s
and receiver
r
(estimated
from a model)
s
s
ee
r
,
:
Measurement noise for pseudorange on L1 and L2
,
1
r
,
2
X
s
,
Y
s
,
Z
s
:
Coordinates of satellite
s
(known from the navigation message)
X
r
,
Y
r
,
Z
r
:
Coordinates of receiver
r
(unknown)
f
1
,
f
2
:
Carrier frequencies of L1 and L2