Image Processing Reference
In-Depth Information
(16)
equations and four unknown parameters that can be writen as
(17)
(18)
So we have to minimize the quadratic error
e
by using the pseudoinverse of
K
. We show
by the following figure an example of affine motion estimation between two synthetic curves
after contours resampling (
Figure 3
). The final result of curves alignment after affine motion
estimation is presented by
Figure 4
. The estimated motion parameters are presented in
Table
2
.
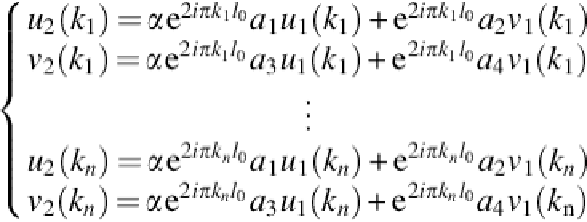
FIGURE 3
Two different shapes after affine deformations ((a) and (c)) and curve resampling
((b) and (d)).
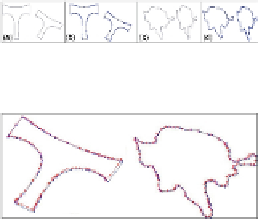
FIGURE 4
Results of affine shape alignment.


Search WWH ::

Custom Search