Information Technology Reference
In-Depth Information
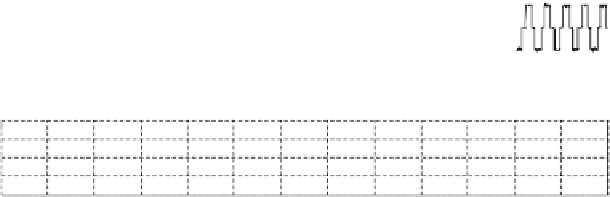
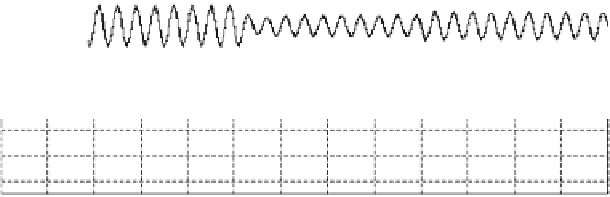
Load Current (Phase A)
20
0
-20
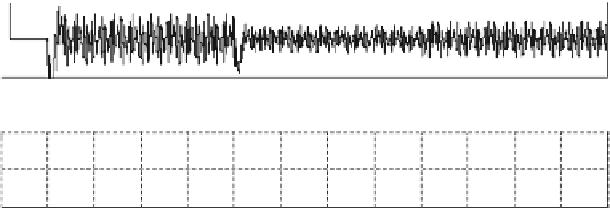
Source Current (Phase A)
40
20
0
-20
-40
Filter Current (Phase A)
10
0
-10
DC Link Voltage & Ref. Voltage
700
680
660
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
Time (sec)
Fig. 14 Dynamic response of shunt APF with 49-rule FLC using Gaussian MFs
Table
3
clearly presents a better value of under-shoot for triangular MFs based FLC,
while minimum settling time for Gaussian MFs.
However, the THD pro
le of source current is superior for Gaussian MFs than
triangular, as shown in Fig.
16
.
The dynamic response of Gaussian membership function outperforms others due
to its constantly varying curved surface incorporating the nonlinear effect as well as
smooth transition pro
le.
Based on these three cases discussed above, the dynamic response of Gaussian
MFs based FLC is superior in Case-1, while triangular MFs dominates during
Case-2, and in Case-3, the performance with both the MFs is at par. However
Gaussian MFs outperforms the triangular MFs in terms of the better harmonic
compensation capabilities throughout the three cases. Hence, the Gaussian MFs
emerges out as the optimum MFs among the considered ones.
4.4 Comparison in Terms of Performance Indices
Automatic control emphasizes on the mathematical formulation and measurement
of system performance for analyzing the controller behaviour using some














































































































































Search WWH ::

Custom Search