Biomedical Engineering Reference
In-Depth Information
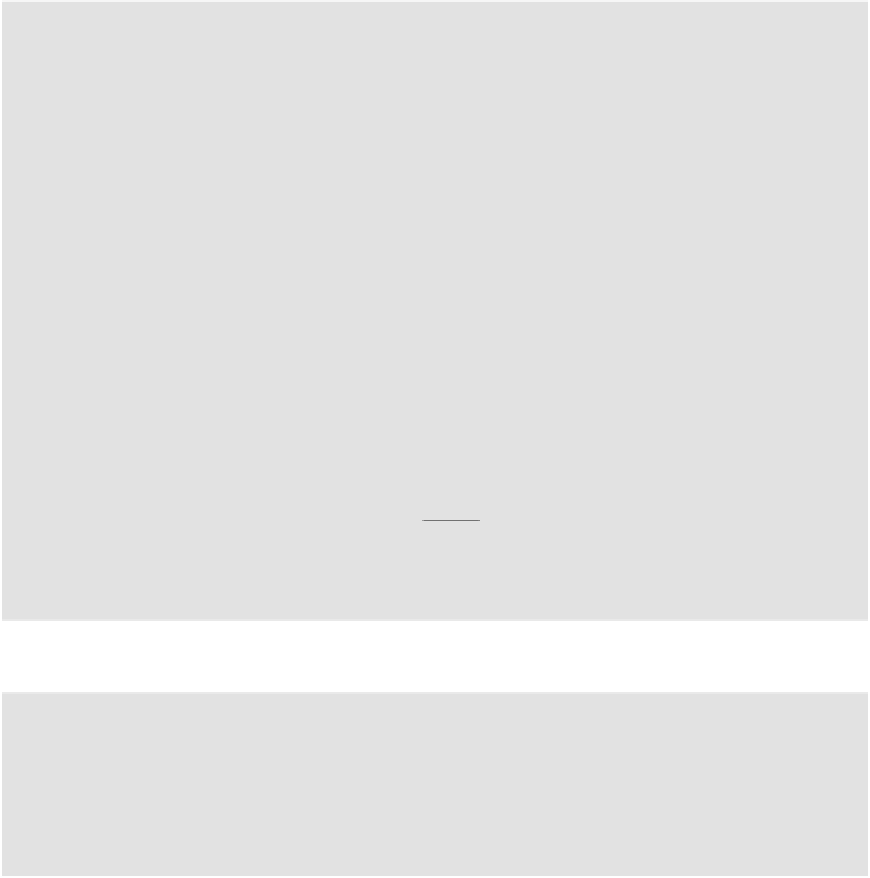
FIGURE 11.4
y
Free-body dia-
gram of a shoulder joint.
F
D
x
F
s
φ
θ
0.45ft
1ft
2.1ft
W
A
W
Writing the equations of motion in vector form, we have
P
F
x
5
0
5
F
s
cos
ðφÞ
2
F
D
cos
ðθÞ
X
F
y
5
52
F
s
sin
ðφÞ
1
F
D
sin
ðθÞ
2
W
A
2
W
0
X
M
0
5
0
5
ð
0
:
45 ft
ÞF
D
sin
ðθÞ
2
ð
1ft
ÞW
A
2
ð
2
:
1ft
ÞW
Solving the third equation for
F
D
F
D
5
ð
1ft
Þð
10 lbf
Þ
1
ð
2
:
1ft
Þð
30 lbf
Þ
555 lbf
5
17
Þ
ð
0
:
45 ft
Þ
sin
ð
Solving the first and second equations
17
Þ
5
F
s
cos
ðφÞ
5
F
D
cos
ðθÞ
5
ð
555 lbf
Þ
cos
ð
530 lbf
17
Þ
2
F
s
sin
ðφÞ
5
F
D
sin
ðθÞ
2
W
A
2
W
5
ð
555 lbf
Þ
sin
ð
10 lbf
30 lbf
122 lbf
2
5
Solving for F
S
,
q
ðF
s
cos
q
ð
2
2
2
2
F
S
5
ðφÞÞ
1
ðF
s
sin
ðφÞÞ
5
530 lbf
Þ
1
ð
122 lbf
Þ
5
545 lbf
To solve for
φ
,
tan
2
1
122 lbf
530 lbf
13
φ
5
5
The force that is generated in the deltoid muscle is very large, which suggests that this is not
a stable position for the arm.
Example
During normal motion (walking, jogging, or running), for some instant in time, all of our
body weight is supported by one leg (see
Figure 11.5
). Typically, the leg is not completely verti-
cal because of the way in which the femur connects to other bones (refer to
Figure 11.6
, the free-
body diagram). Using the following values, calculate the reaction forces that act in the hip joint
during running at the instant when the body is supported by one leg. The angle between the


























Search WWH ::

Custom Search