Information Technology Reference
In-Depth Information
3.2 Double Model Controller Based on Fuzzy Rules Switching
As already mentioned above, both the fuzzy and PID control is required to
improve the dynamic and steady state performance of the oxygen excess ratio
regulation. The fuzzy controller should play a major role of regulation when the
steady state error exists and error rate is big. Similarly, when the error rate is
small and the steady state error exists, the PID control should play a major role
instead of fuzzy control. Hence, a strategy based on the fuzzy rules is needed
to determine when and how to switch the control model . The structure of the
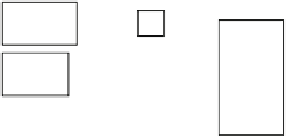
system is shown in Figure 3. In this paper, the switching strategy which we call
u
PID
Ȝ
ǻe
ǻec
r
O2,ref
PID
Ȝ
u
O2
Fuzzy
r
Fuzzy
Fig. 3.
Structures of the control system
as soft switching is proposed.
r
PID
and
r
fuzzy
are the adjustment coecient of
PID and fuzzy control, and the sum of
r
PID
and
r
fuzzy
is 1.
The range of
r
PID
and
r
fuzzy
are [0, 1]. And the output of the double model
controller with fuzzy and PID control can be expressed as
u
=
r
PID
u
PID
+
r
fuzzy
u
fuzzy
.
(12)
The fuzzy and PID controller can generate the appropriate amount of control
through the error and error rate, and the control coecients
r
PID
and
r
fuzzy
which can be obtained by fuzzy rules is used to determine which control strategy
play a major role. And the control amount contains the corresponding proportion
of PID and fuzzy control effect, which realize the soft switch between fuzzy
control and PID control. In this work, a fuzzy inferior is proposed to choose the
suitable control coecient. The inputs of fuzzy inferior are
e
and
ec
,andthe
fuzzy subsets of input are N, Z, P. The output of fuzzy inferior is PID control
coecient
r
PID
, of which the range is [0, 1], and the output fuzzy subsets is
PS, PB. And the fuzzy inference rules are shown in Figure 4. The membership
functions of inputs and output are respectively showed in Figure 5.
4 Simulation and Analysis
The proposed control strategy was implemented as a Simulink model with the
structure given in Figure 3. The sampling time for the simulation was set to be




















































Search WWH ::

Custom Search