Information Technology Reference
In-Depth Information
Fig. 5.
System of variable spraying mobile robot
0.02
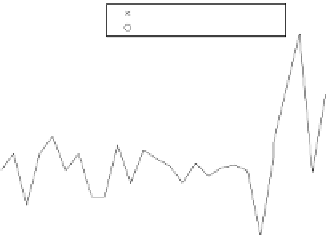
FNN Decision−making Output
Fuzzy Decision−making Output
0.015
0.01
0.005
0
−0.005
−0.01
0
5
10
15
20
25
Number of Test Sample
Fig. 6.
Error output of test sample
The simulation experiment shows that the fuzzy neural network decision
method proposed can implement high precision decision effectively and meet
the requirements for mobile robot spraying pesticide in greenhouse.
5 Conclusions
In this paper, the model of variable spraying for a greenhouse mobile robot based
on a fuzzy neural network is established, and an intelligent decision-making
method of variable spraying based on the fuzzy neural network is proposed. The
simulation results show that
1) Considering comprehensively cultivation method, growth features and the
level of pests and diseases in modern greenhouse, the intelligent decision-making
system proposed integrates not only the target information of distance and area,
but also the damage level of plant diseases and insect pests.
2) The fuzzy neural network decision-making method proposed can realize
the real-time and quick decision by oine training. It has the greater decision
accuracy than the fuzzy decision system on the samples not appearing in training










































































Search WWH ::

Custom Search