Global Positioning System Reference
In-Depth Information
Fig. 6. Three solutions and reference for first trajectory: Red for reference, Yellow for KF
using full IMU with velocity updates, Green for KF using RISS without updates, Blue for KF
using RISS with velocity updates.
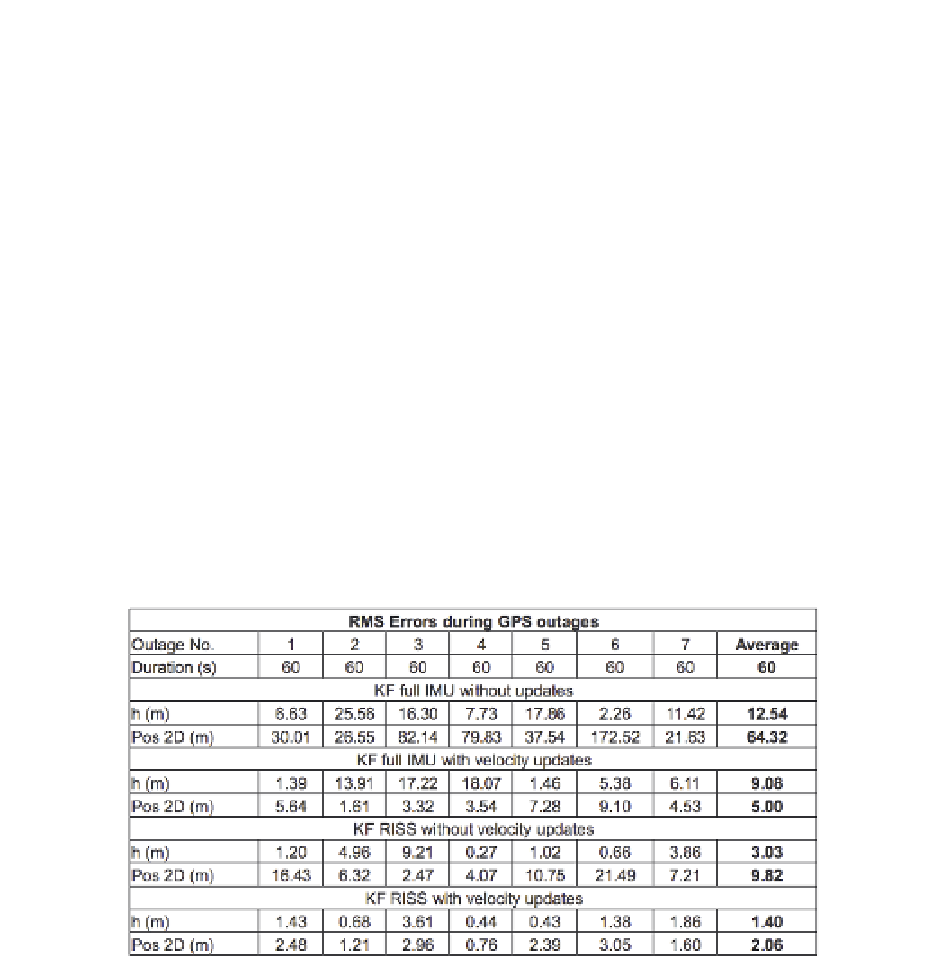
Fig. 7. RMS errors for altitude and 2D position for the seven outages in first trajectory.
The benefit of using wheel encoders to provide velocity updates during GPS outages can be
seen by two comparisons. The first comparison uses KF with full IMU and considers two
sets of results, one with and the second without velocity updates. With velocity updates the
solution has an average of the maximum positional error for the seven GPS outages equal to
8.77 meters while the case without updates has 139.3 meters of error. The second comparison
uses KF with RISS and considers two sets of results, one with and the second without velocity
updates. With velocity updates the solution has an average of the maximum positional error
for the seven GPS outages equal to 3.35 meters while the case without updates has 18.67
meters of error.

Search WWH ::

Custom Search