Global Positioning System Reference
In-Depth Information
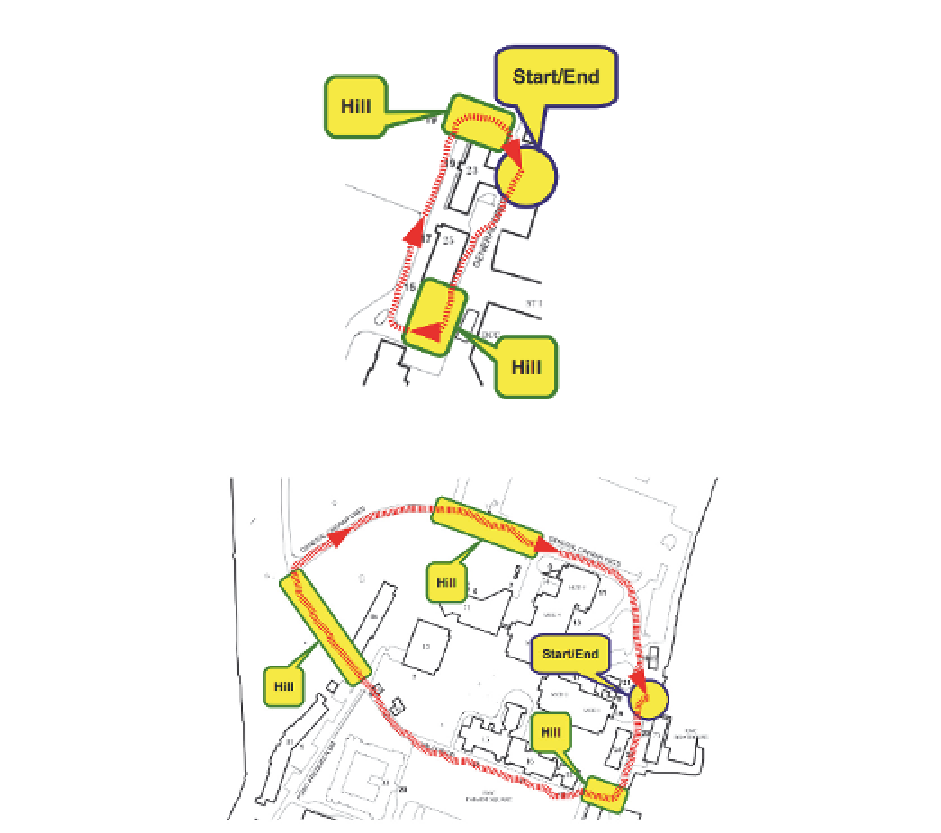
Fig. 4. The first trajectory for assessing each navigation solution.
Fig. 5. The second trajectory for assessing each navigation solution.
errors are calculated with respect to the NovAtel reference solution. Table 8 shows the
maximum errors in the estimated 2-D horizontal position and the estimated altitude during
these outages. fig 6 shows a 2-D plot of four tracks, namely: (1) the reference solution, (2)
KF with full IMU and velocity updates during GPS outages (3) KF with RISS and without
updates during outages and (4) KF with RISS and velocity updates during outages. The KF
with full IMU and without updates during GPS outages is not shown because the position
errors would dramatically change the scale of the plot and make comparison of the other
solutions very difficult.
The results in table 8 and fig 6 clearly show the advantage of RISS over a full IMU. There is
a big difference in 2-D positional errors when one compares the results of KF with full IMU
without updates with the results of KF with RISS without updates during GPS outages. While
the former has an average of the maximum positional error for the seven GPS outages equal
to 139.3 meters, the latter shows an error of 18.67 meters. The reason for this difference is the
use of accelerometers vice the two gyroscopes used to get pitch and roll from the RISS.
Search WWH ::

Custom Search