Global Positioning System Reference
In-Depth Information
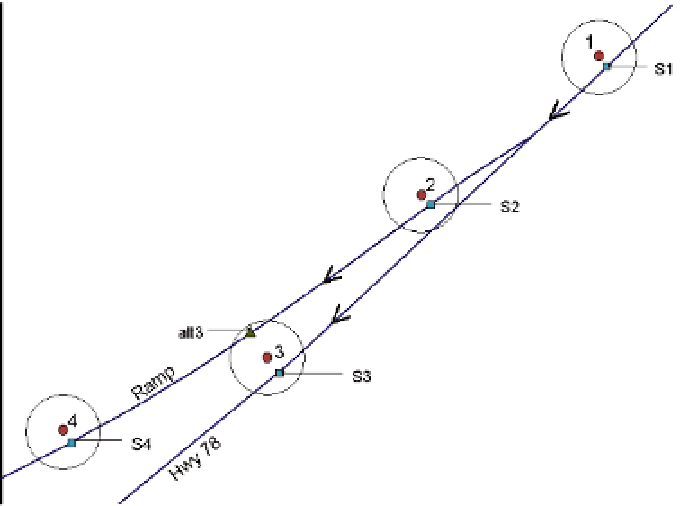
ahead by snapping point 4 to the nearest roadway centerline within its buffer, and
determines if the shortest path between snapped points S3 and S4 is possible. Since the
tested path is not feasible, the algorithm snaps point 3 to the next nearest roadway centerline
within its buffer obtaining point alt3, shown as a triangle.
Fig. 4. Example of an Alternative Roadway Centerline Snapping
Subsequently, the upper part of the algorithm (shown in Figure 5) for alternative roadway
centerline search and feasibility path check is initiated. This algorithm verifies if a path is
feasible between the alternative snapped location for point 3 (where Ki = 3), and former
and succeeding neighboring snapped points 2 and 4 (where Ki-1 = 2 and Kj = 4). If the
shortest paths between these three points are not feasible because the speed comparison
fails, then the algorithm searches for other roadway centerlines within the buffer around
point 3 that have not already been used in a feasibility path check. When finding a new
candidate, point 3 is then snapped to it and the feasibility of shortest paths between
snapped points 2, 3, and 4 (Ki-1, Ki, Kj) is checked again. If these paths are feasible, then
the spatial ambiguity is resolved, and the algorithm terminates. If no alternative roadway
centerline exists within the buffer for GPS data point 3, then the algorithm continues by
snapping data point 4 to alternative roadway candidates contained within its buffer, and
the upper part of the algorithm is executed again. If no other roadway centerlines exist
within the buffer of GPS data point 4 or no feasible paths are obtained, then the lower part
of the algorithm is executed and feasible paths between preceding and subsequent data
points are examined. If none of the consecutive data points aid in solving the spatial
mismatch between the snapped points for 2 and 3, then it is likely that no roadway
centerlines within their buffers yield a feasible path and larger buffers and/or more
consecutive data points need to be utilized by the algorithm. Once a feasible path is
obtained, the intermediate points not employed during the map-matching process are
snapped to the roadway along that feasible path.




Search WWH ::

Custom Search