Biomedical Engineering Reference
In-Depth Information
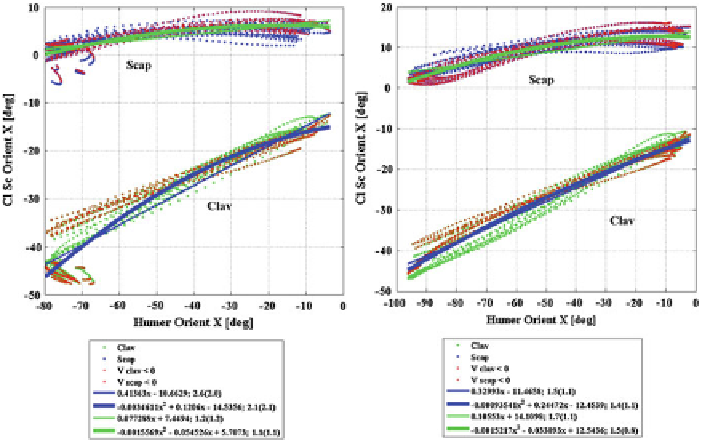
Fig. 9.9
Comparison between ZXY Cardan (
on the left side
)andOVP(
on the right
) conventions
for humerus abduction/adduction (humerus rotation around X axis of the thorax LCS). Note that the
raw input data show different values between both graphs because they are represented according
different conventions
or a pseudo-dislocation of Scap (i.e., a so-called “winged Scap”). This is obviously
not physiological and should be avoided.
This last section present the implementation of a supplementary method do avoid
this kind of artifact provoked by the appearance of non-physiological relationships
between the anterior aspect of Scap and the posterior aspect of Thor. The correction
used the model described above including all shoulder joint related segments (Thor,
Clav, Scap, Hum). Sternoclavicular and acromioclavicular joints were modeled as
ball-and-socket structures while the glenohumeral joint included six DoFs. At first,
the ShRm prediction model allows frame-by-frame estimation of the attitude of
Clav and Scap. If Scap artefacts occur, then the following scapulothoracic gliding
constraints can be implemented as a correction step to Scap behavior. We advised to
constraint Scap using ellipsoidal surfaces derived from the outer aspects of the rib
surface. The constraint equation supposes that the distance [
81
] between the Scap
inferior angle (RSIA, see Table
9.1
) anatomical landmark and its projection on the
ellipsoidal surface remains constant.