Graphics Reference
In-Depth Information
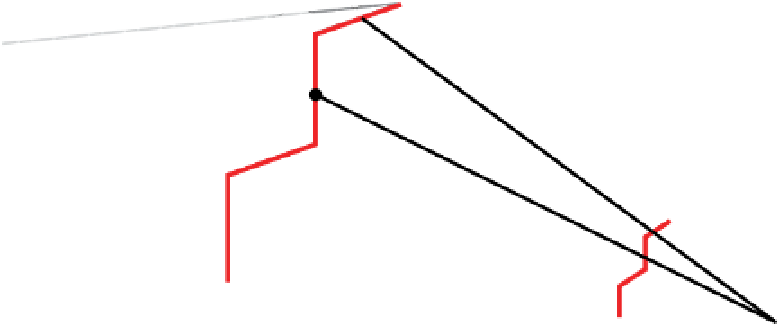
Laser
Calibration object
Camera
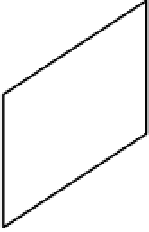
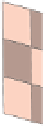
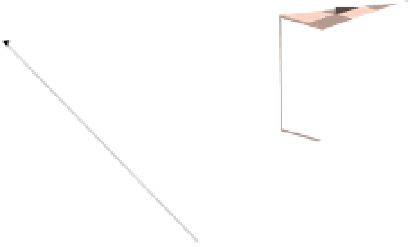
Figure 8.12.
An object with known 3D geometry can be used to calibrate a light plane with
respect to an image plane. The black 3D dots on different surfaces of the calibration object are
all coplanar since they lie on the laser plane.
There are several ways to obtain the correspondences between the image plane
and the light plane that we need to estimate the parameters of the projective transfor-
mation, all of which require a calibration object with known 3D geometry. Typically
we exploit the knowledge that a given image point lies on a known world plane [
385
]
or world line [
86
], or matches exactly with a known world point [
211
].
A straightforward approach uses a calibration object made up of cubes with
checkerboard faces of known dimensions, as illustrated in Figure
8.12
. With the laser
turned off, the checkerboards supply the information required to calibrate the cam-
era using the plane-based method of Section
6.3.2
or the resectioning method of
Section
6.3.1
. With the laser turned on, the light plane intersects multiple planes in
the image whose equations are known. By intersecting rays from the now calibrated
camera's center with these planes, we obtain a set of co-planar points, to which we
can fit a 3D plane (at least three points are required on two different surfaces). Once
we have the equation of the plane in 3D, we can change coordinates to obtain the
Now we have a direct mapping given by Equation (
8.4
) between any point in the
image plane and 3D world coordinates, but only for a single position of the light
plane (i.e., a single stripe on the object). To scan the entire object, the laser stripe
projector and camera (which are rigidly mounted to each other) usually move along
a precisely controlled linear (e.g., Figure
8.9
a) or circular (e.g., Figure
8.9
b) path, such
that the world coordinate transformation between any two positions of the scanner
head is known. Alternately, the projector/camera rig stays in place while a precisely
computer-controlled stage translates the object through the light plane. Handheld
laser stripe scanners (e.g., the Polhemus FastSCAN) use a magnetic sensor to localize
the scanner head in space (using similar technology to magnetic motion capture
systems).
7
Or, we can simply leave the
(
X
,
Y
,
Z
)
values in the same world coordinate system in which the
planes were defined.