Graphics Reference
In-Depth Information
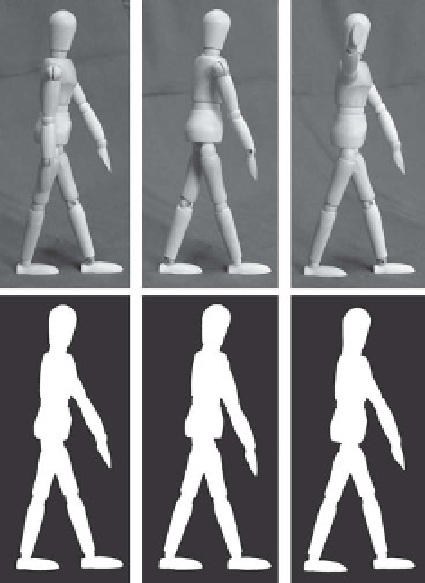
Figure 7.21.
Three different poses and their
corresponding silhouettes. We can see that
major left/right and depth ambiguities are
introduced when we only consider the sil-
houette from a given view, and that different
poses can have similar silhouettes.
(a)
(b)
(c)
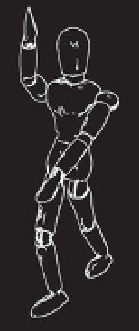
Figure 7.22.
(a) Original image. (b) Silhou-
ette. (c) Edges detected inside the silhouette.
The edges clarify the position of the left arm,
which was difficult to determine from the
silhouette.
(a)
(b)
(c)
We describe a basic approach to computing the observation likelihood
p
(
r
(
t
)
|
θ
(
t
))
when
r
(
t
)
consists of the binary silhouettes
{
S
i
(
t
)
}
and edge maps
{
E
i
(
t
)
}
frommulti-
ple images,
i
is used to generate a solid humanmodel
in a certain pose. Since the cameras are calibrated, we can project this pose into each
camera's view to obtain
M
silhouette images of the model
=
1,
...
,
M
. A given value of
θ
(
t
)
{
S
i
(
t
)
}
and
M
edge maps
{
E
i
of the model
. The observation likelihood is therefore related to how well the
corresponding silhouette and edge images match, as illustrated in Figure
7.23
.
For example, we could use
(
t
)
}
λ
M
M
,
S
i
,
E
i
p
(
r
(
t
)
|
θ
(
t
))
∝
exp
−
D
s
(
S
i
(
t
)
(
t
))
+
λ
D
e
(
E
i
(
t
)
(
t
))
(7.37)
1
2
i
=
1
i
=
1