Graphics Reference
In-Depth Information
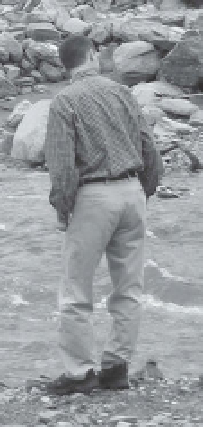
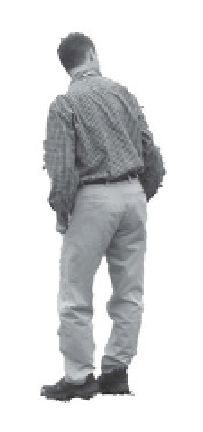
Figure 7.20.
Estimating human pose from
a single image (a) is a difficult computer
vision problem. Even if the human can be
automatically segmented from the image as
in (b), loose clothing, confounding textures,
and kinematic ambiguities mean that many
degrees of freedom are estimated poorly.
(a)
(b)
difficult to individually segment, and the right knee has a bulge of fabric far from the
actual joint. Image edges can help separate an image of a human into body parts for
a bottom-up segmentation, but edges can also be confounding (e.g., a striped shirt).
We also face kinematic ambiguities. For example, in Figure
7.20
the left arm is
foreshortened and the position of the left elbow joint is unclear; the right wrist and
hand are completely obscured. Even with high-resolution cameras, it's also difficult
to resolve rotations of the arm bones around their axes; for example, the orientation
of the left hand in Figure
7.20
is difficult to guess. Sminchisescu and Triggs [
457
] esti-
mated that up to a third of the underlying degrees of freedom in a kinematic model
are usually not observable from a given viewpoint due to self-occlusions and rota-
tional ambiguities. The poses of hands and feet are especially difficult to determine,
which is why markerless systems frequently don't include degrees of freedom for the
wrist and ankle joints.
Manymarkerless algorithms discard the original image entirely in favor of a
silhou-
ette
of the human, estimatedusing background subtraction (i.e.,matting; seeChapter
2
). This exacerbates the problems illustrated in Figure
7.20
, and introduces new ones.
In Figure
7.21
a-b, we can see that it's impossible to disambiguate the right limbs of
the body from the left limbs by looking at the silhouette, leading tomajor ambiguities
in interpretation. It's also difficult to resolve depth ambiguities (e.g., whether a fore-
shortened arm is pointed toward the camera or away from it). More generally, we can
see that two very different poses can have similar silhouettes. Consequently, small
changes in a silhouette can correspond to large changes in pose (e.g., an arm at the
side (Figure
7.21
a) versus an armpointing outward (Figure
7.21
c)). Therefore, several
silhouettes from different perspectives are required to obtain a highly accurate pose
estimate.
Figure
7.22
illustrates that some uncertainties can be mitigated if we also use
edge
information
inside the silhouette. For example, the location of an arm crossed in
front of the body might be better estimated if the boundary between the forearm and
torso can be found with an edge detector.