Geoscience Reference
In-Depth Information
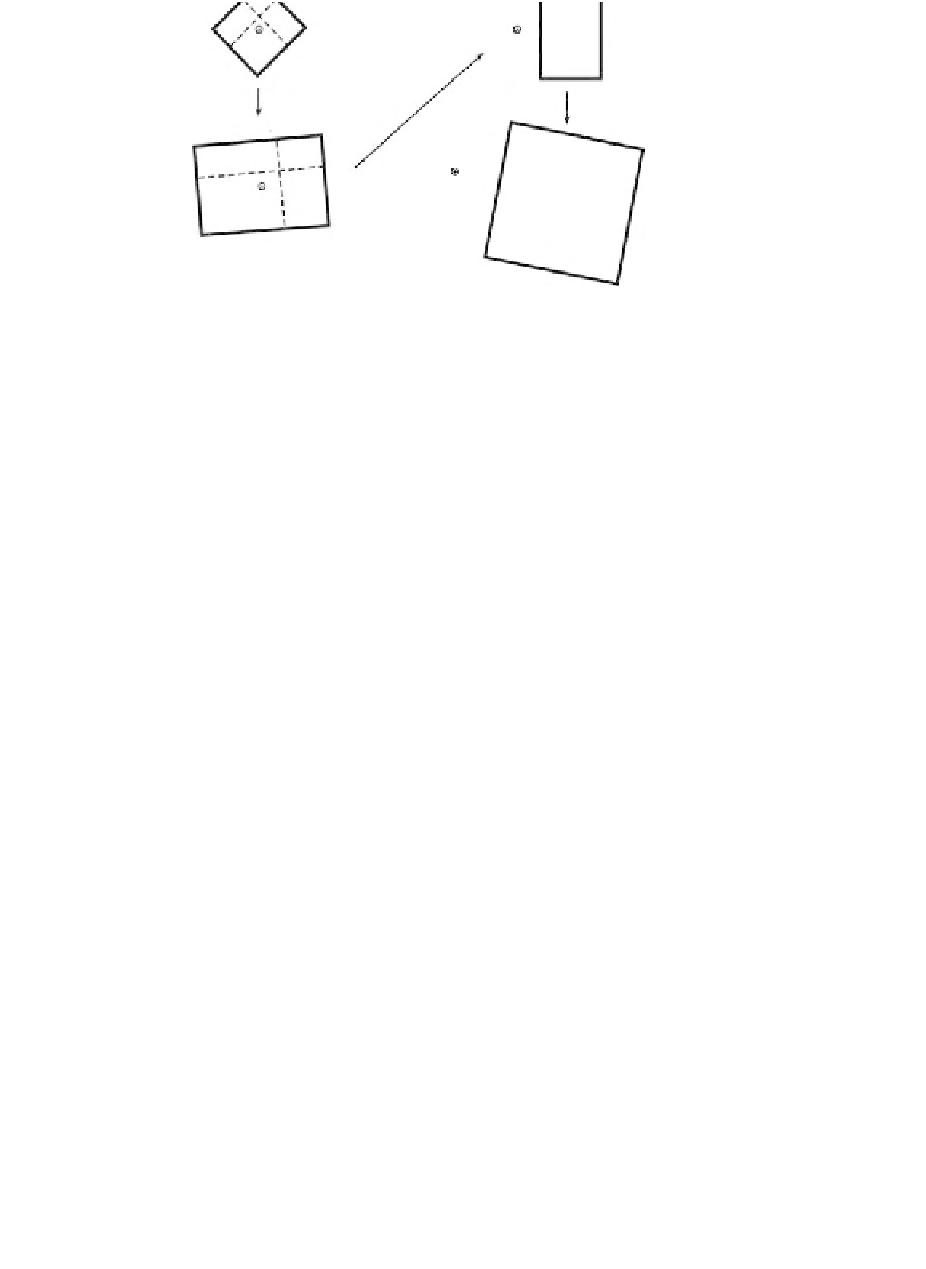
2.2 km pixel
3.0 km pixel
4.3 km pixel
PMT
center
Edge of scan
5.4 km pixel
FOV switching position
766 km from nadir
Figure 20.2
The OLS fine-resolution nighttime visible band instantaneous field of view (IFOV) data starts at
2.2 km at the nadir and expands to 4.5 km at 766 km out from the nadir. After the PMT electron
beam is switched the IFOV is reduced to 3 km and expands to 4.8 km at the far edges of the scan.
GSD) and smoothed data (2.7-km GSD). All data are acquired in fine resolution mode, but in most
cases the recorded data are converted to the smoothed resolution by averaging of 5
5 pixel blocks.
While the GSD of OLS data is kept constant, the instantaneous field of view (IFOV) gradually
expands from the nadir to the edge of the scan (Figure 20.2). At nadir the low-light imaging IFOV
of the fine resolution data is 2.2 km and it expands to 4.3 km 800 km out from the nadir. At this
point in the scan the electron beam within the OLS PMT automatically shifts to constrain the
enlargement of pixel dimensions, which normally occurs as a result of cross-track scanning (Lieske
, 1981). This reduces the IFOV to 3 km. The IFOV then expands to 5.4 km at the edge of the scan,
1500 km out from the nadir. Thus, the IFOV is substantially larger than the GSD in both the along-
track and along-scan directions. At the nadir the smoothed OLS low-light imaging pixel has an
IFOV of 5 km and at the edge of the scan the IFOV is approximately 7 km.
In order to build cloud-free global maps of nighttime lights and to separate ephemeral lights
(e.g., fires) from persistent lights from cities, towns, and villages, a compositing procedure is used
to aggregate lights from cloud-free portions of large numbers of orbits, spanning months or even
multiple years (Elvidge et al., 1997, 1999, 2001). To avoid the inclusion of moonlit clouds in the
products, only data from the dark half of the lunar cycle are composited. The lights in the resulting
composites are known to overestimate the actual size of lighting on the ground.
The objective of this chapter is to document the area and positional accuracy of OLS nighttime
lights and to examine the causes for the area overestimation of OLS lighting. We have done this
using light from isolated sources located in southern California. The analyses were conducted using
data from four OLS sensors spanning a 10-year time period.
¥
20.2 METHODS
20.2.1
Modeling a Smoothed OLS Pixel Footprint
A scaled model of an OLS PMT smoothed pixel IFOV at nadir was built by placing 25 fine-
resolution pixel footprints onto a 5
5 grid, each displaced by a 0.5-km GSD. The number of
times a light would get averaged into a smoothed pixel was tallied for each of the resulting polygon
outlines (Figure 20.3). A similar model was built to show the IFOV overlap between adjacent PMT
smoothed pixels. This model was constructed by placing nine of the smoothed pixel footprints from
Figure 20.5 onto a 3
¥
3 grid using a scaled GSD of 2.7 km. The number of smoothed pixel
detection opportunities was then tallied for each polygon zone (Figure 20.4).
¥