Biomedical Engineering Reference
In-Depth Information
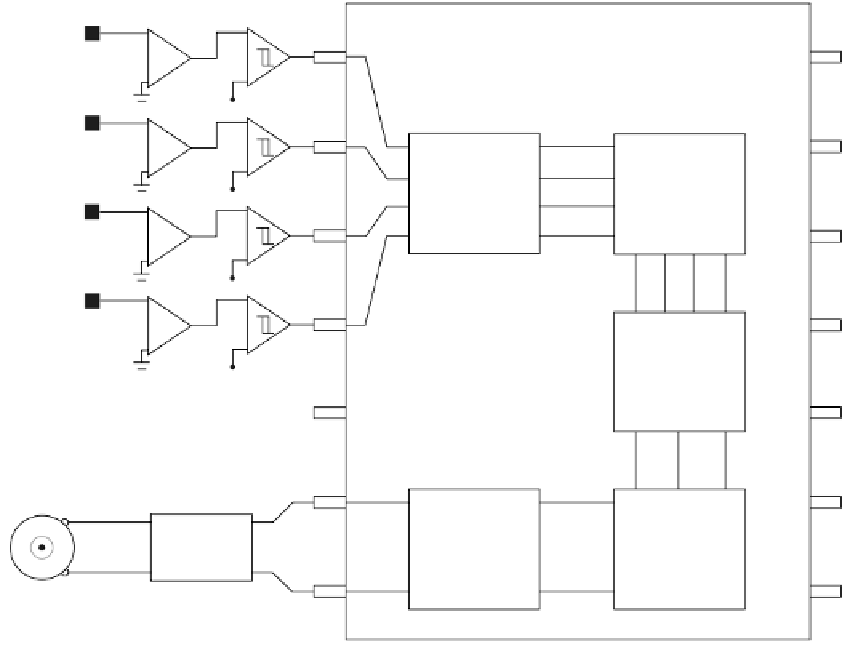
signals directly simplifies programming and eliminates the need for time-consuming ana-
log to digital conversion. As shown in Figure 17.22, the microcontroller reads four input
channels in parallel. Based on the current implementation, the four input pins are sampled
at a rate of 500 HZ. Each new input triggers an internal counter on that channel, emulat-
ing the pulse delay. The microcontroller continues to scan input channels for additional
digital signals on other input channels. Direction and speed can be determined between
two neighboring pixels whenever their delays are overlapping in time. If no other digital
signals are detected within a pixels' delay period, the time delay simply terminates until
a new signal arrives.
Motion is determined by correlating the delay digital input from one pixel with the
appearance of a digital signal from a neighboring pixel. Pixel positions (input channels)
are used to determine the motion direction, and a binary local direction signal is set for
each pixel pair. Speed is extracted by measuring the time interval between two pixels.
The outputs of every two neighboring pixels are integrated to produce a globe motion
measure, which is proportional to the average motion speed. Depending on the
intended application, the global motion information can be transmitted to the external
system in various formats. Figure 17.22 shows a DC motor connected to the microcon-
troller through a PWM driver. Two output channels send direction and speed informa-
tion to the DC motor.
ST1
bR pixel 1
+
+
A1
8-bit microcontroller
V
ref
ST2
bR pixel 2
+
+
A2
Read
digital
input
channels
Apply
input
pulse
delay
V
ref
ST3
bR pixel 3
+
+
A3
V
ref
ST4
bR pixel 4
+
+
A4
Determine
neighboring
pixel delay
intersections
V
ref
DC motor
Generate
PWM and
direction
output
Compute
intersection
and direction
integration
PWM
driver
FIGURE 17.22
Architecture block diagram illustrating the implementation of bR photoreceptor motion detector. Several func-
tions are simulated within a PIC microcontroller to simplify prototyping and experimentation.