Information Technology Reference
In-Depth Information
−
4
−
6
τ
=
5
×
10
s
τ
=
5
×
10
s
(a) Frequency tracking (b)
,
A
B
−
4
−
6
−
3
−
6
(c)
τ
=
5
×
10
s
,
τ
=
1
×
10
s
(d)
τ
=
2
.
5
×
10
s
,
τ
=
5
×
10
s
A
B
A
B
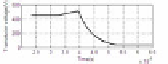
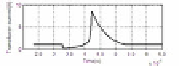
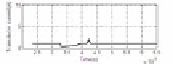
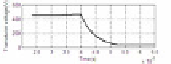
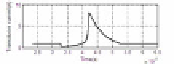
Fig. 7.
Overshoot of the voltage and current when the transducer being unload
voltage increase is faster (or
A
τ
is smaller). However, speed of voltage decrease(
)
τ
B
doesn't affect the regulation process at all.
As shown in Figure 7, when load decreases, the slower the voltage increases, the
smaller the overshoot of incentive voltage will be. The overshoot v and the voltage
current both depend on the speed of voltage decrease (or
τ
). The faster the voltage
B
decreases (or
τ
is smaller), the smaller overshoot of the current will be.
B
6 Conclusions
The asymmetric automatic steady speed control
method proposed in this paper offer a
solution to protect devices by reasonably setting up/down speed of driven voltage and
frequency tracking speed. The faster the speed of the voltage decreases, the smaller
overshoot is. By comparison with the traditional method, the transducer controlled
using the proposed method will be subjected to a smaller overshoot of voltage and
current, no matter how the load changes in the process.
References
1.
Mortimer, B., du Bruyn, T., Davies, J., Tapson, J.: High power resonant trancking amplifier
using admittance locking. Ultrasonics 39, 257-261 (2001)
2.
Chen, Z., Zhao, C., Huang, W.: An Effective Frequency Tracking Control and Balancing
Compensation between CW & CCW Rotation Speed Techniques for Ultrasonic Motor. In:
2004 IEEE International Ultrasonics, Ferroelectrics and Frequency Control Joint 50th Anni-
versary Conference, pp. 2251-2254 (2004)
3.
Shuyu, L., Fucheng, Z.: Measurement of ultrasonic power and electro-acoustic efficiency of
high power transducers. Ultrasonics 37, 549-554 (2000)
4.
Xu, L.: Amplitude controlling in ultrasonic machining. Electromachining & Mould (6), 24-
26&III-VI (2004) (in Chinese)
5.
Mizutani, Y., Suzuki, T., Ikeda, H., Yoshida, H.: Automatic Frequency Control for Maxi-
mizing RF Power Fed to Ultrasonic Transducer Operating at 1MHz. Thirty-First IAS An-
nual Meeting, IAS 1996, Conference Record of the 1996 IEEEIndustry Applications Con-
ference, 1996, vol. 3, 1585-1588 (1996)


Search WWH ::

Custom Search