Biomedical Engineering Reference
In-Depth Information
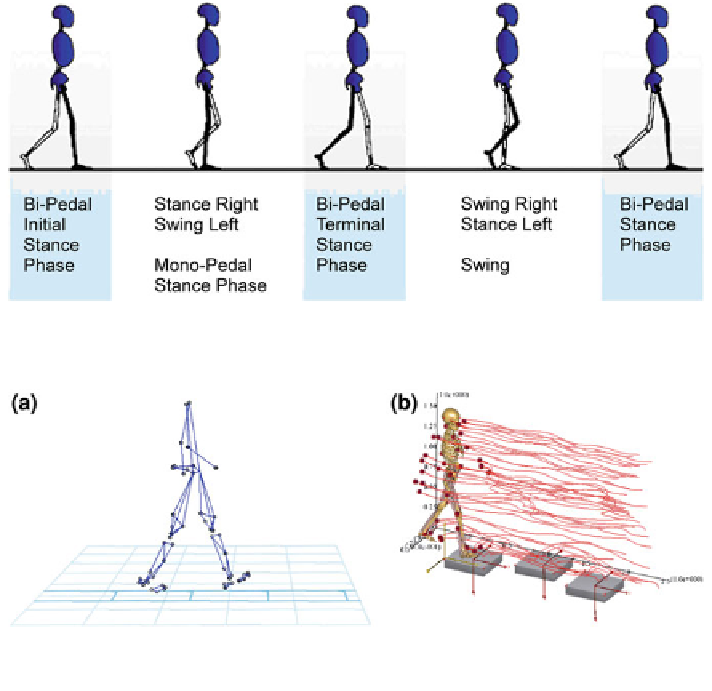
Fig. 5.66
Gait cycle during walking with stance and swing phases
Fig. 5.67 a Digitalized marker positions via motion capturing method, b trajectories of the
position markers in conjunction with force measurement ground sensors
In contrast to the swing phase in which one foot is in the air, the stance phase is
defined as the interval in which this foot contacts the ground. The stance can be
divided into three phases: (1) bi-pedal initial stance phase: begin of the stance
phase where both feet are in contact with the ground, (2) mono-pedal stance phase:
the contralateral foot is lifted for swing and (3) the bi-pedal terminal stance phase
where the contralateral foot contacts the ground. With the (next) lift of the foot the
swing phase terminates. At the beginning and at the end of each stance phase, both
feet contact the ground, hence the term bi-pedal stance phase. The duration of one
gait cycle varies with gait motion, and the stance phase represents about 60 % of
the gait cycle. The swing phase constitutes 40 %, whereby the stance phase is
made up of 10 % of both bi-pedal stance phases and 40 % of the mono-pedal
stance phase, cf. (
www.biomechanics.de
2009).
To generate a realistic FE-model simulating human motion during walking and
running, particularly foot rolling, human motion and ground reaction forces were
captured and video analysis was performed. The kinematic and kinetic data were
gathered at the biomechanics institute at ETH Zürich/Swiss (supervision by Prof.