Biomedical Engineering Reference
In-Depth Information
contour
C
deforming with a speed
V
along its normal direction:
|∇
C
|
V
=
1
,
V
>
0
(2.2)
Their fundamental idea is, instead of tracking in time the positions of the front
C
(
x
,
y
) on a regular grid as:
(
t
)
={
(
x
,
y
)
|
C
(
x
,
y
)
=
t
}
(2.3)
to embed the curve into a higher dimension function
φ
(
x
,
y
,
t
) such that:
1. at time zero the initial contour
C
0
corresponds to the level zero of the
function
φ
:
C
0
={
(
x
,
y
)
/φ
(
x
,
y
,
0)
=
0
}
.
(2.4)
2. the function
φ
evolves with the dynamic equation:
∂φ
∂
t
=|∇
φ
|
V
.
(2.5)
In this framework, at any time
t
, the front implicitly defined by:
(
t
)
={
(
x
,
y
)
/φ
(
x
,
y
,
t
)
=
0
}
(2.6)
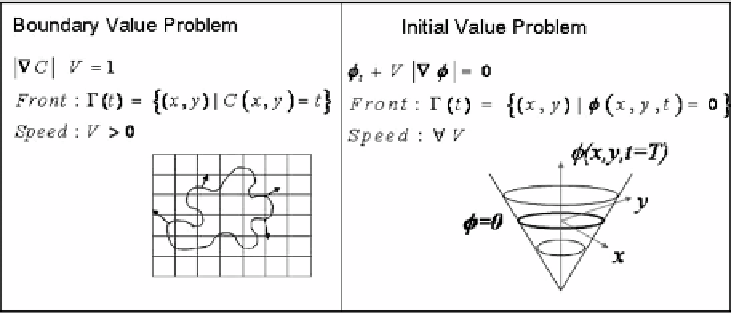
corresponds to the solution of the initial boundary value problem defined para-
metrically in Eq. (2.3). This result is illustrated in Fig. 2.2.
Figure 2.2: Correspondence between a parametric and implicit level-set for-
mulation of the deformation of a contour with a speed term oriented along the
normal direction.