Biomedical Engineering Reference
In-Depth Information
algorithms. This matrix, when filled with proper coefficients, expresses prior
knowledge about the decisions of each classifier. Again, the coefficients can be
estimated iteratively from the classifier decisions by an EM algorithm.
In the “E” step of the EM algorithm, the unknown ground truth segmentation
is estimated. Given the current estimate for the classifier parameters (
λ
) and the
classifier decisions
e
k
(
x
), the likelihood of voxel
x
being in class
C
i
is
P
(
x
∈
C
i
)
k
λ
(
k
)
i
,
e
k
(
x
)
W
(
x
∈
C
i
)
=
i
P
(
x
∈
C
i
)
k
λ
i
,
e
k
(
x
)
.
(11.15)
(
k
)
Note that
W
is a function of two parameters,
x
and
i
. The “M” step of our
algorithm estimates the classifier parameters (
λ
) that maximize the likelihood
of the current ground truth estimate determined in the preceding “E” step. Given
the previous estimates
W
of the class probabilities, the new estimates for the
classifier parameters are computed as follows:
x
:
e
k
(
x
)
=
j
W
(
x
∈
C
i
)
x
W
(
x
∈
C
i
)
.
ˆ
(
k
)
i
,
j
=
(11.16)
λ
11.6.3
Results of Performance-Based
Multiatlas Segmentation
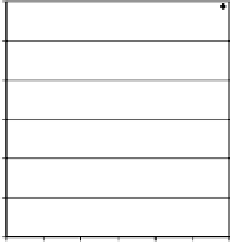
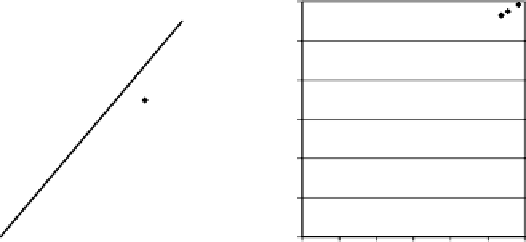
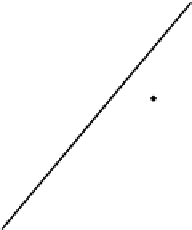
The accuracy of the performance parameter estimation using both EM algo-
rithms is shown in Fig. 11.21. We computed the actual performance parameters
for each atlas-based classifier by comparing its output with the manual segmen-
1.00
1.00
y = 1.1488x - 0.1554
R
2
= 0.7576
0.90
0.90
y = 1.1198x - 0.1574
R
2
= 0.8887
0.80
0.80
0.70
0.70
0.60
0.60
0.50
0.50
0.40
0.40
0.40 0.50 0.60 0.70 0.80 0.90 1.00
Recognition Rate by Structure and
Atlas
0.40 0.50 0.60 0.70 0.80 0.90 1.00
Recognition Rate by Structure and
Atlas
(a) Binary Performance Model
(b) Multilabel Performance Model
Figure 11.21:
Accuracy of classifier performance parameter estimation using
EM algorithms.